

参考资料:
zed-ros-wrapper —— ROS Wiki
ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试 —— 李小铭
又一遍……ORB_SLAM2+ZED相机(SDK2.2.1)+CUDA9.0+ROS Kinetic 安装测试 some tips —— 哀酱
Ubuntu18.04+ZED+ROS Melodic+ORB_SLAM2 —— hhhhpanda
TX2使用记录系列文章(6)-TX2之ZED的使用 —— lg296910694
修改zed-ros-wrapper的参数
执行roslaunch zed_wrapper zed2i.launch命令后会按如下顺序调用:
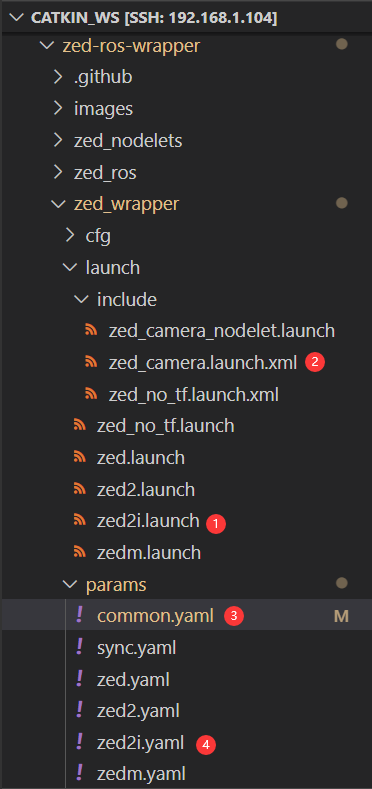
我们常用的参数配置都在zed-ros-wrapper/zed_wrapper/params/common.yaml文件中,我们如果需要更改一些初始设置值时,在下面这个文件中修改即可
这里我将抓取和发布的频率改为100Hz,画质改为了VGA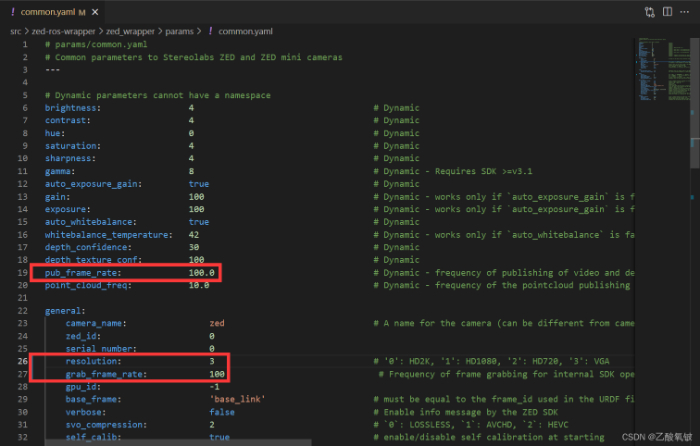
双目测试
仿照Examples/ROS/ORB_SLAM3/src目录下的ros_stereo.cc,建立一个新文件,如zed_stereo_rect.cc
cp ros_stereo.cc zed_stereo_rect.cc
修改字符串的内容: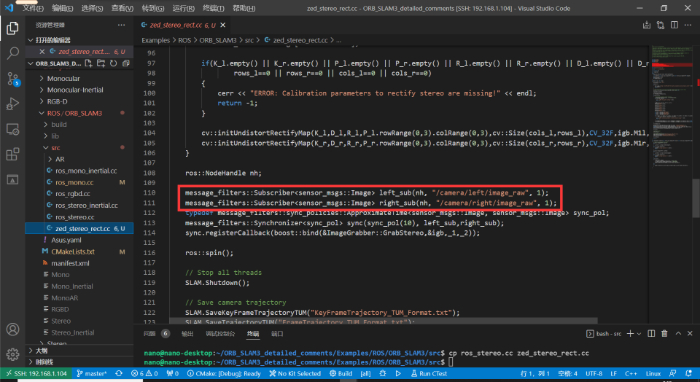
将
message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/camera/left/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "/camera/right/image_raw", 1);
修改为
message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/zed2i/zed_node/left/image_rect_color", 1);
message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "/zed2i/zed_node/right/image_rect_color",1);
该字符串取自上一篇文章使用的rostopic list命令
此处选取了ZED 2i的两个数据流。
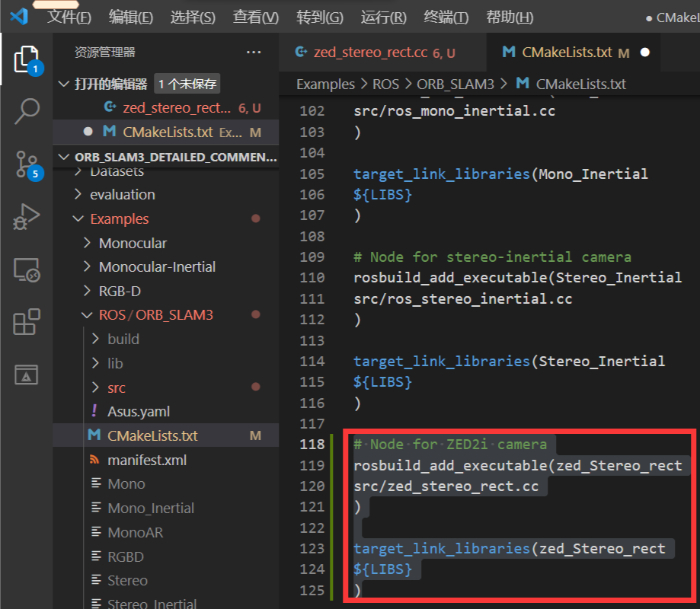
然后修改Examples/ROS/ORB_SLAM3/CmakeLists.txt,仿照加入:
# Node for ZED2i camera
rosbuild_add_executable(zed_Stereo_rect
src/zed_stereo_rect.cc
)
target_link_libraries(zed_Stereo_rect
${LIBS}
)
在ORB_SLAM3的根目录下重新编译:
./build_ros.sh
会新生成一个可执行文件 zed_Stereo_rect
开一个终端
source ~/catkin_ws/devel/setup.bash
roslaunch zed_wrapper zed2i.launch
另开一个终端
cd ~/ORB_SLAM3_detailed_comments
rosrun ORB_SLAM3 zed_Stereo_rect Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml false
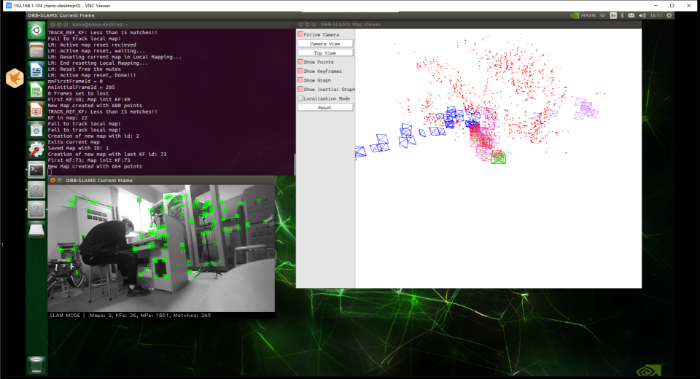
")


评论(0)
您还未登录,请登录后发表或查看评论