本节目标:学习gtsam与isam在二位位姿pose2和三维位姿pose3上的使用,并将isam用于位姿的因子图优化。 预期效果:将ICP匹配带来的瞬间位移变成对之前累积误差的消除。蓝色ICP无图优化,紫色ICP后进行图优化。 程序:https://gitee.com/eminbogen/one_liom test_gtsam里有学习 gtsam,isam的四个程序 图优化学
0.前言 昨天看了关于SLAM的综述文章一篇,对于其中提到的SIFT,SURF,ORB三种特征提取匹配的方法,非常想要实践学习其Python的编写方法。同时我爸让我帮他写一个树莓派(raspberry pi)检测黑点的程序,黑点有什么好检测的(╯•̀ὤ•́)╯,考虑到神经网络识别计算复杂度过高,我决定用模板匹配法去做。 1.程序汇总 链接: https://pan.baidu.com/s/1d
0. 前言 最近尝试着去在SLAM当中使用深度学习,而目前的SLAM基本上是基于C++的,而现有的Pytorch、Tensorflow这类框架均是基于python的。所以如何将Python这类脚本文件来在C++这类可执行文件中运行,这是非常有必要去研究的,而网络上虽然存在有例子,但是很多都比较杂乱,所以本篇文章将网络上常用的方法进行整理,以供后面初学者有迹可循 1. 模型认识 我们知道,目前基于C
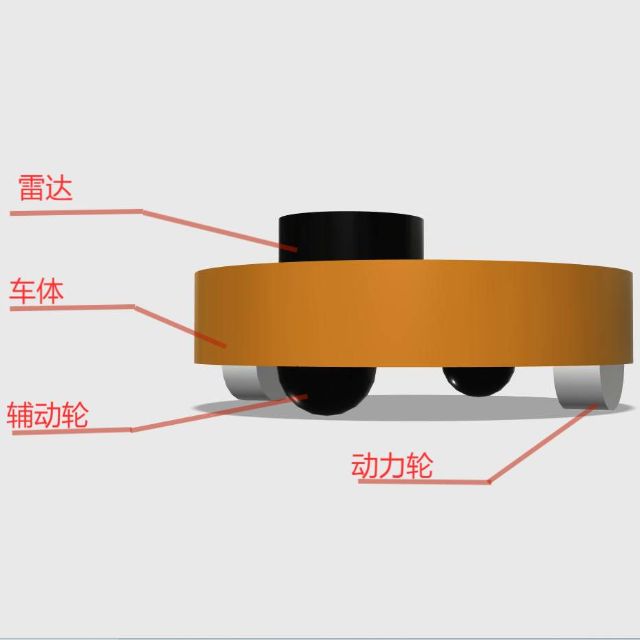
为了把本篇文章的任务讲清楚,定好核心方向,我们需要把该算法所引用的场景任务梳理一下。 任务用一句话描述就是融合建图嘛,融合的传感器包括: 1)组合导航系统(输出绝对位姿) 2)雷达里程计(输出相邻帧间相对位姿) 3)回环检测系统(输出再次走到同一场景时,当前帧与历史帧之间的相对位姿) 综合以上各种信息,整个系统的结构图大概应该长这个样子 如果对这些东西做融合的具体实现还不清楚,可以再回头去看一下
决策树(decision tree)是机器学习中最常见的方法之一,本文主要对决策树的定义,生成与修剪以及经典的决策树生成算法进行简要介绍。 目录 一、什么是决策树 二、决策树的生成 三、决策树的修剪 四、一些经典的决策树生成算法 一、什么是决策树 顾名思义,决策树是基于树结构来进行决策的。它每次从训练样本的若干属性中选择一项出来进行判定,并根据样本在该属性上的取值将样本划入不同的集合,之
本文在Ubuntu18.04 + ROS melodic环境下完成,其他ROS版本类似。 在本教程中,我们将逐步创建一个支持ROS的非常基本的gazebo插件。 一、创建一个ROS包 $ cd ~/catkin_ws/src $ catkin_create_pkg gazebo_tutorials gazebo_ros roscpp 二、创建插件 按照此处所述创建一个非常简单的插件,并将文件另
!转载请注明原文地址!——东方旅行者 更多行人重识别文章移步我的专栏:行人重识别专栏 本文目录 难样本挖掘三元组损失(TriHard_Loss.py) 一、难样本挖掘三元组损失作用 二、难样本挖掘三元组损失编写思路 三、代码 四、测试结果 难样本挖掘三元组损失(TriHard_Loss.py) 一、难样本挖掘三元组损失作用 用于计算度量损失,与表征学习阶段分类损失协同使
[toc]目录 一、直接法和光流 1.1 光流 1.2 直接法 二、后端 三、BA和图优化 一、直接法和光流 特征点VO做法: 在图像中提取特征点并计算特征描述,非常耗时,~10+ms in ORB 在不同图像中寻找特征匹配,非常耗时 in brute force matching 利用匹配点信息计算相机位姿,比较快<1ms 那么不使用特征匹配计算VO? 通过其他方式寻找
上篇文章讲解了如何在固定位置使用Hector构建单帧的栅格地图,以及知道了SLAM的本质就是将不同时刻的scan在正确的位置上写成栅格地图. 本篇文章将对 Hector 进行简单的重写,使得其代码更简单,更清晰. 这也是本系列教程第一次成功建出一张比较好的地图. 先放图,虽然有些瑕疵,但是整体还是不错的.话不多说,先说明一下对代码做了那些改变,然后再着重讲解一下 Hector是如何做sca
接着上次的《活体检测Face anti-spoofing综述》,再来讲讲arXiv上新挂的文章: 京东金融和中科院联合发表的“Exploiting temporal and depth information for multi-frame face anti-spoofing”[1] 它的主要创新和贡献是: 利用了多帧的时空信息来更精准地预测深度图,再而进行活体检测 --------------
真是惭愧,上一篇笔记还是一年前写的,现在opencv已经出到版本4了,今年专栏文章会尽量保证不断更不停更。文章中理论性的东西会相对较少,更偏向于结合工程中的实际应用来学习,以具体代码来实现相关功能。另外,每篇文章基本上是个人结合官方文档和Google到的相关资料,尽可能规范且易于理解和实现地总结整理得出,展示的所有代码均实际跑过。为了保证兼容性,对于旧的文章也会作相关更新。当然有错误和不准确的地方
文章目录 实现效果 一些设置 导航点设置 添加连接用于碰撞的设置 代码实现 终端输出 改进 实现效果 给定目标点,生成机械臂工具坐标中心点到达该目标点时,关节角的配置。 因为机械臂在抓取物品时需要先到达“作业临近点”,所以这里设置的目标点在原来的Z轴上偏移一小段距离。 可以看到此时生成的关节角的配置只是xyz位置相同,欧拉角表示的姿
当我们已有现成地图的时候,ros的Navigation程序包可以根据已有地图进行定位导航,其中的move_base程序包应用ros的actionlib机制接收全局目标点,进行路径规划,然后对移动机器人进行控制行进至目标点。本文将展示用c++和python如何应用actionlib来向move_base发送目标点。 参考: Map-Based Navigation 【1】 ROS学习 Py
在没有真实物理实体实验设备的情况下,通过在计算机上用软件模拟真实设备运行的效果,这就叫做软件仿真实验,用软件仿真是一条可行性高、测试成本低、实验效率高的一条路。就拿ROS小车的避障策略设计 来说,如果我们设计了一个避障策略想要实验一下效果如何的话,一般都需要先做一个真实的ROS小车,这样就需要花费不少的钱。当在真实的小车上实验时还会遇到小车电池电量不够、运行时间短、测试环境不 够完善等各
1.2 线性映射 1.2.1 线性映射与线性变换 设V1V1,V2V2,是 F上的线性空间,σ:V1V1→V2V2是映射。 (保加性)σ(e1e1+e2e2)= σσ(e1e1)+σ(e2e2) (保数乘性)σ( e⋅k )=σ( e ) ⋅ k 则成 σ 是 V1V1到 V2V2的线性映射。 若 V1V1=V2V2= V,则称为 V 上的线性变换。 若线性映射 是可逆映射(一一
您真的懂了移动机器人是怎么构建地图的吗? 1、前言 假如,您现在已经拥有一辆ROS小车了,您已经完成了通过ROS节点发布的/cmd_vel话题控制小车的基本运动了。当然,这些都是底层部分,您也许还需要完成移动机器人的建图和导航工作。本篇文章以激光SLAM算法gmapping为例,向大家介绍移动机器人构建环境地图的必备条件、算法流程、算法原理。 其实,使用gmapping算法实现建图的步骤十分简单,
占据栅格地图构建(Occupancy Grid Map) 上一篇文章介绍了,移动机器人地图构建问题,主要以gmapping为例,讲解了地图构建的整个流程。看过前面文章的小伙伴肯定都知道,gmapping算法把SLAM问题分解成两个部分,定位问题和地图构建问题。而gmapping中的地图构建就是采用占据栅格地图构建算法实现的。 之前文章:https://blog.csdn.net/zhao_ke_x
为你心动的课程投票了吗? 你期待的“心动选手”就在今晚成团啦 今晚18:00活动开始! 古月居双十一限时活动上线啦! 属于你的限定心动 还不来看看吗? 限量秒杀 又到了拼手速的时候了! 10门限量抢购课程 买到就是赚到 没有难凑的满减 也没有让社恐害怕的组队 只有最简单的限量秒杀 昨天的投票有你的一份 今日份的课程你肯定也能拥有! 今晚18:00-19:00 即可进入课程限时
上一节我们说到了机械臂的关节与关节舵机驱动程序的基本原理;这一节我们将使用STM32单片机来实现机械臂运动的编程。 0. 本节基本内容 本节主要介绍了如何利用单片机蓝牙-串口中断控制6路舵机转角;具体涉及的技术点为: 配置STM32单片机的Timer3与Timer8比较输出 配置STM32的串口中断,基于中断传输帧格视的数据 配置HC-05蓝牙,并与笔记本上的蓝牙调试器进行
KDL(Kinematics and Dynamics Library)中定义了一个树来代表机器人的运动学和动力学参数,ROS中的kdl_parser提供了工具能将机器人描述文件URDF转换为KDL tree. Kinematic Trees: 链或树形结构。已经有多种方式来定义机构的运动学结构,KDL使用图论中的术语来定义: A closed-loop mechanism is a gr
第三方账号登入
看不清?点击更换



























第三方账号登入
QQ 微博 微信