
在对目标识别与跟踪的实现中,一般采取的是RGB感兴趣区域提取,即通过设定目标物的RGB范围并对其进行提取。但是摄像头拍摄照片的RGB值会随光照等原因所影响,所以固定场景的话效果会比较好。由于设定的是一个范围,所以有可能会把一些环境中的物体认定为目标物。
使用LIMO机器人做目标识别的效果:
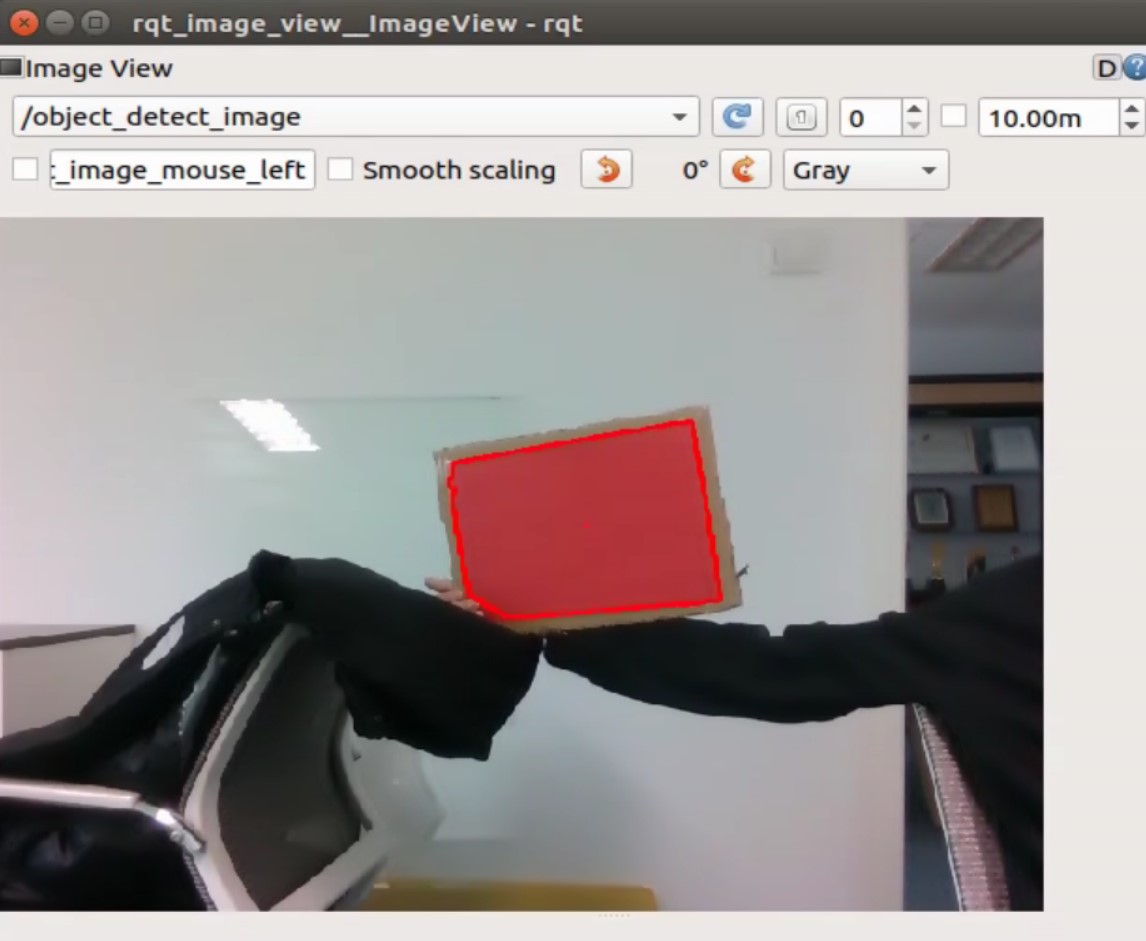
在对目标识别与跟踪的实现中,一般采取的是RGB感兴趣区域提取,即通过设定目标物的RGB范围并对其进行提取。但是摄像头拍摄照片的RGB值会随光照等原因所影响,所以固定场景的话效果会比较好。由于设定的是一个范围,所以有可能会把一些环境中的物体认定为目标物。
使用LIMO机器人做目标识别的效果:
您还未登录,请登录后发表或查看评论




第三方账号登入
QQ 微博 微信