

思维导图
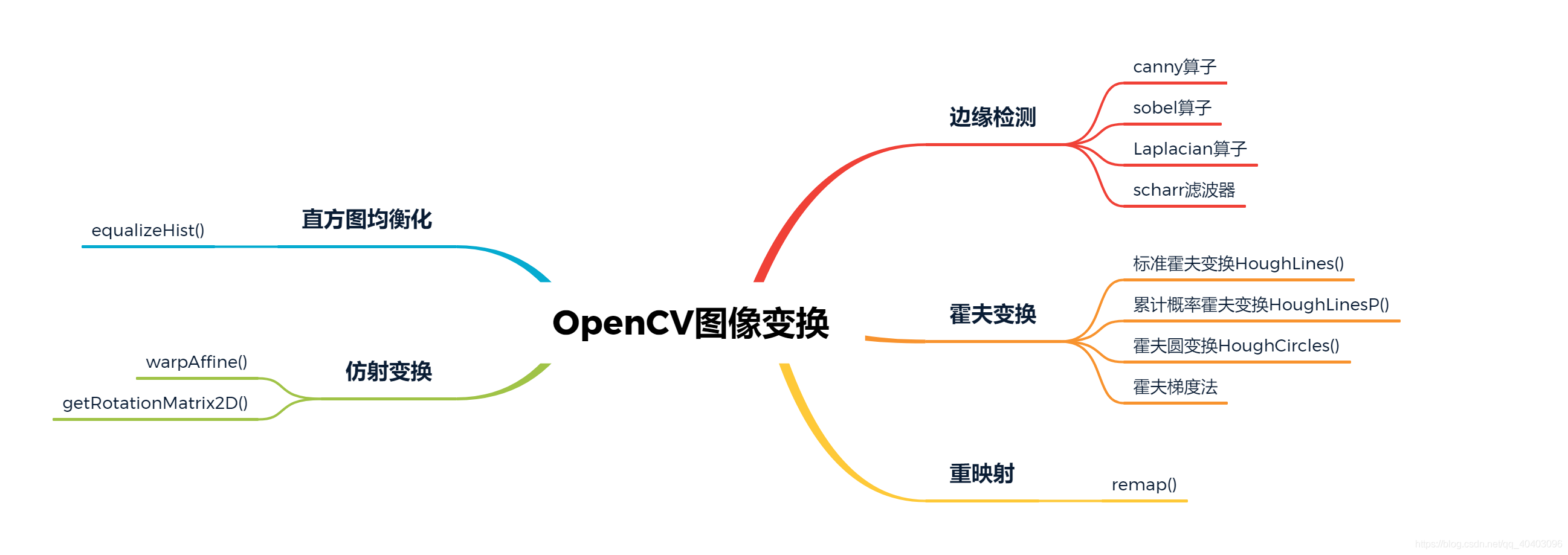
1.边缘检测
// Canny算子
Canny( g_cannyDetectedEdges, g_cannyDetectedEdges, g_cannyLowThreshold, g_cannyLowThreshold*3, 3 );
//sobel算子
// 求 X方向梯度
Sobel( g_srcImage, g_sobelGradient_X, CV_16S, 1, 0, (2*g_sobelKernelSize+1), 1, 1, BORDER_DEFAULT );
convertScaleAbs( g_sobelGradient_X, g_sobelAbsGradient_X );//计算绝对值,并将结果转换成8位
// 求Y方向梯度
Sobel( g_srcImage, g_sobelGradient_Y, CV_16S, 0, 1, (2*g_sobelKernelSize+1), 1, 1, BORDER_DEFAULT );
convertScaleAbs( g_sobelGradient_Y, g_sobelAbsGradient_Y );//计算绝对值,并将结果转换成8位
// 合并梯度
addWeighted( g_sobelAbsGradient_X, 0.5, g_sobelAbsGradient_Y, 0.5, 0, g_dstImage );
//Laplace函数
Laplacian( src_gray, dst, CV_16S, 3, 1, 0, BORDER_DEFAULT );
//scharr
// 求 X方向梯度
Scharr( g_srcImage, g_scharrGradient_X, CV_16S, 1, 0, 1, 0, BORDER_DEFAULT );
convertScaleAbs( g_scharrGradient_X, g_scharrAbsGradient_X );//计算绝对值,并将结果转换成8位
// 求Y方向梯度
Scharr( g_srcImage, g_scharrGradient_Y, CV_16S, 0, 1, 1, 0, BORDER_DEFAULT );
convertScaleAbs( g_scharrGradient_Y, g_scharrAbsGradient_Y );//计算绝对值,并将结果转换成8位
// 合并梯度
addWeighted( g_scharrAbsGradient_X, 0.5, g_scharrAbsGradient_Y, 0.5, 0, g_dstImage );2.霍夫变换
//HoughLines霍夫线变换
vector<Vec2f> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合
HoughLines(midImage, lines, 1, CV_PI/180, 150, 0, 0 );
//依次在图中绘制出每条线段
for( size_t i = 0; i < lines.size(); i++ )
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000*(-b));
pt1.y = cvRound(y0 + 1000*(a));
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*(a));
line( dstImage, pt1, pt2, Scalar(55,100,195), 1, LINE_AA);
}
//调用HoughLinesP函数
vector<Vec4i> mylines;
HoughLinesP(midImage, mylines, 1, CV_PI/180, g_nthreshold+1, 50, 10 );
//循环遍历绘制每一条线段
for( size_t i = 0; i < mylines.size(); i++ )
{
Vec4i l = mylines[i];
line( dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(23,180,55), 1, LINE_AA);
}
//HoughCircles霍夫圆变换
vector<Vec3f> circles;
HoughCircles( midImage, circles, HOUGH_GRADIENT,1.5, 10, 200, 100, 0, 0 );
//依次在图中绘制出圆
for( size_t i = 0; i < circles.size(); i++ )
{
//参数定义
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
//绘制圆心
circle( srcImage, center, 3, Scalar(0,255,0), -1, 8, 0 );
//绘制圆轮廓
circle( srcImage, center, radius, Scalar(155,50,255), 3, 8, 0 );
}3.重映射
//创建和原始图一样的效果图,x重映射图,y重映射图
dstImage.create( srcImage.size(), srcImage.type() );
map_x.create( srcImage.size(), CV_32FC1 );
map_y.create( srcImage.size(), CV_32FC1 );
//双层循环,遍历每一个像素点,改变map_x & map_y的值
for( int j = 0; j < srcImage.rows;j++)
{
for( int i = 0; i < srcImage.cols;i++)
{
//改变map_x & map_y的值.
map_x.at<float>(j,i) = static_cast<float>(i);
map_y.at<float>(j,i) = static_cast<float>(srcImage.rows - j);
}
}
//进行重映射操作
remap( srcImage, dstImage, map_x, map_y, INTER_LINEAR, BORDER_CONSTANT, Scalar(0,0, 0) );4.仿射变换
//仿射变换
warpAffine( srcImage, dstImage_warp, warpMat, dstImage_warp.size() );5.直方图均衡化
// 直方图均衡化
equalizeHist( srcImage, dstImage );参考书籍《OpenCV3编程入门》



评论(0)
您还未登录,请登录后发表或查看评论