

重度拖延症失踪人口终于回归了。这一次本菜做一个看起来挺装逼的仿真---某冗余蛇形机械臂在某狭小空间内的轨迹跟踪。额,有点类似于蛇从蛇窝里溜出去,然后在外边遛个弯儿... 话不多说,直接上场景:
1. 场景
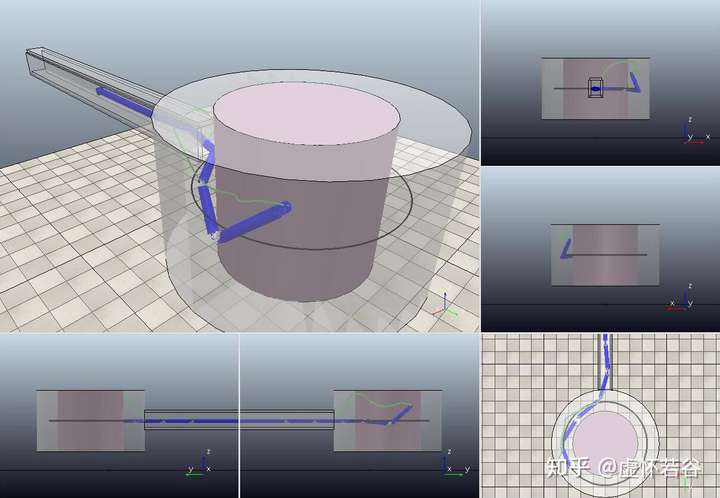
如上图所示,左侧狭窄的矩形空间是“蛇窝”,右侧内外圆柱面以及上下底面所夹的区域是窝外的活动场所。我们期望“蛇头”,也就是机械臂末端沿着黑线所示的平面圆周做匀速运动。考虑到蛇体自身的几何参数,很显然蛇头不可能完美跟踪圆周,如果只考虑跟踪误差来驱动蛇体必然是装得头破血流。因此,为了保证蛇体的安全,要在跟踪的过程中考虑碰撞避免约束。
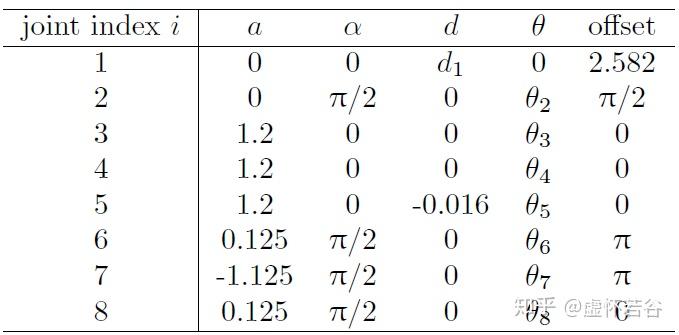
机器人的 Modified DH 参数如下:
2. 碰撞避免约束
为了避免与环境发生碰撞,要求控制对象与障碍物的最短距离与安全距离之间满足约束 在这里环境是静态的,那么
, 即最短距离只是机械臂关节位置的函数。这里的障碍物已经做了简化,只有平面片和圆柱面片;机械臂连杆本来就是圆柱,不需要做简化。因此,机器人与环境的最短距离计算就只包含圆柱面与平面,圆柱面与圆柱面的最短距离计算。
为了避免自碰撞,这里限制关节位置范围即可。
3. 定义NMPC问题
这里目标函数考虑末端的位置,姿态,线速度,角速度跟踪误差以及控制输入惩罚。约束包括初始状态,关节速度控制输入模型,正运动学,正微分运动学,碰撞避免约束(这里做了连杆的圆柱半径修正),状态和控制输入约束。
其中参考轨迹定义如下:
4. 仿真结果

通过这个例子,我们可以深刻体会到什么叫约束优先。NMPC是一种一定满足约束,尽量减小目标函数的控制器,很符合特种环境下安全操作的需求。
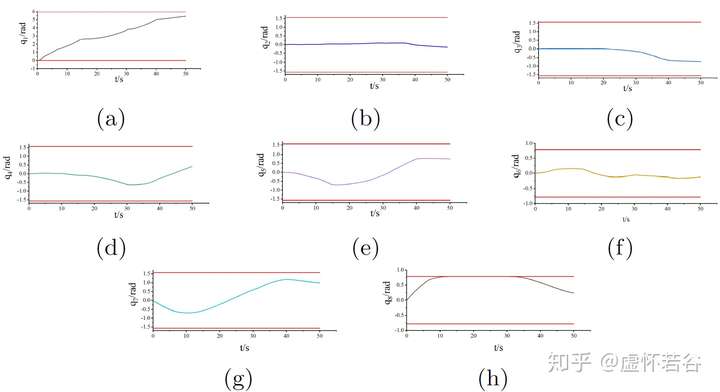
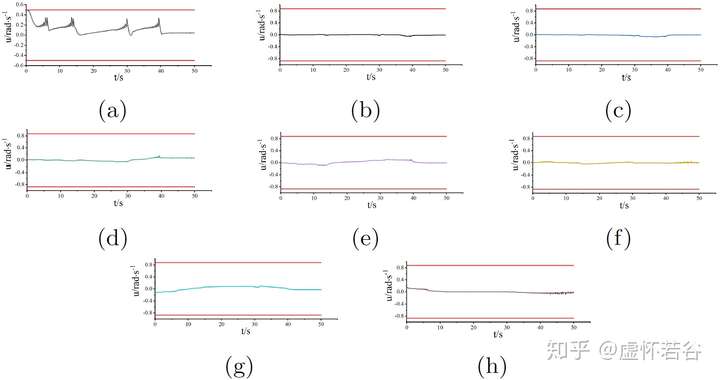
具体的关节位置,关节速度输入如下图所示,可以看出都是在规定的约束范围内。
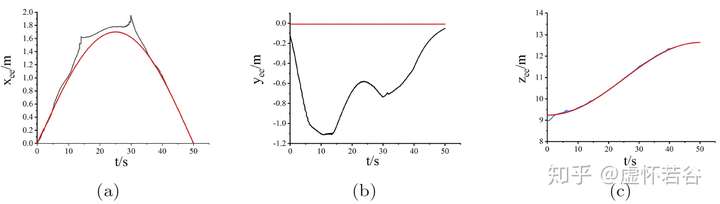
末端位置反馈值与参考值如下图所示,可以看出在 平面内跟踪误差较小,在
方向跟踪误差较大。
欢迎大佬们继续指教本菜!
-----------------------------------------------------
本例程源文件目前暂不能公开,请谅解!
-----------------------------------------------------
做人呐,最重要的就是开心喽。能帮到别人是最大的快乐,希望本菜鸡能对小白们有所帮助,希望大佬们的批评能帮助本菜鸡成长!




评论(0)
您还未登录,请登录后发表或查看评论