

01 roblocks使用方法
在命令行输入roblocks
打开机器人工具箱的模块库
使用‘roblocks’命令打开simulink 机器人模块时提示版本过低的解决办法:
① 打开帮助–选择小齿轮设置–simulink–open simulink preferences
② 然后去掉图中的√ Do not load models created with a newer version of simulink
点击 应用 即可
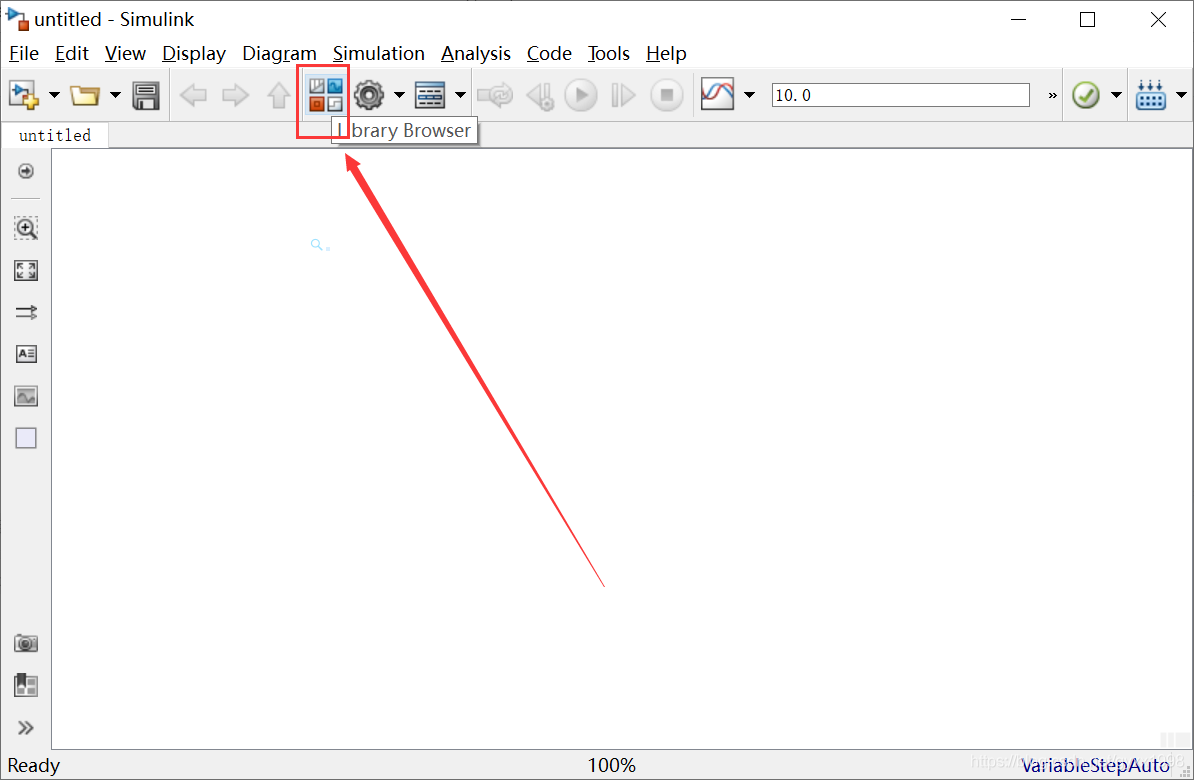
打开simulink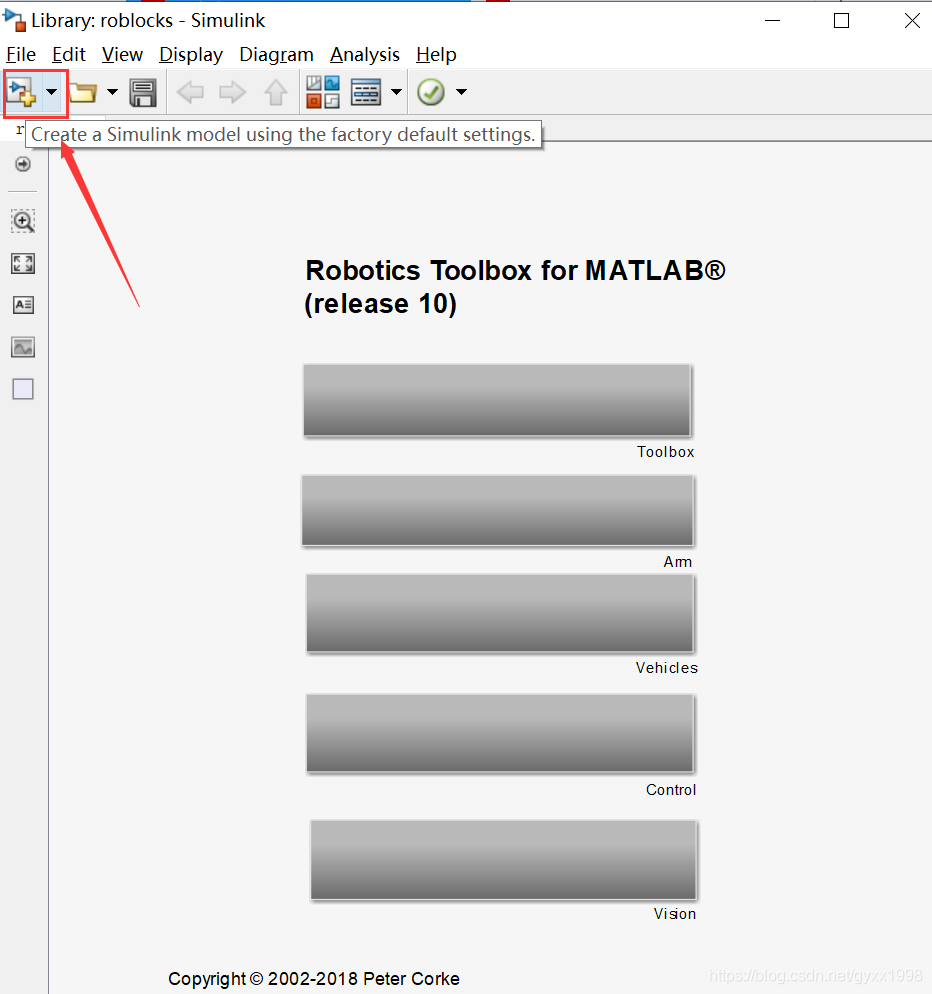
打开simulink库
说明:
使用roblocks中的一些模块,一般需要制定机器人名字,以及做一些前面的准备
如,对于jtraj模块,需要指定以下内容
n = 6; %要求的关节角度维度,若是六自由度,n=6;
ts = 0.01; %采样时间,在连续时间t之间间隔取值,因此后面的t就不要是离散点集了
q0 = [0,0,0,0,0,0]; %初始关节角度
qf = [0 pi/4 pi 0 pi/4 0]; %终止时刻关节角度
t = 0:10; %完成坐标移动要求的时间
[q,qd,qdd] = jtraj(q0,qf,t);%输出一个点沿一条五次多项式曲线运动随时间变化的坐标
tmax = max(t);
参考:https://blog.csdn.net/xiaohejiaoyiya/article/details/88618322
02 计算力矩控制方法
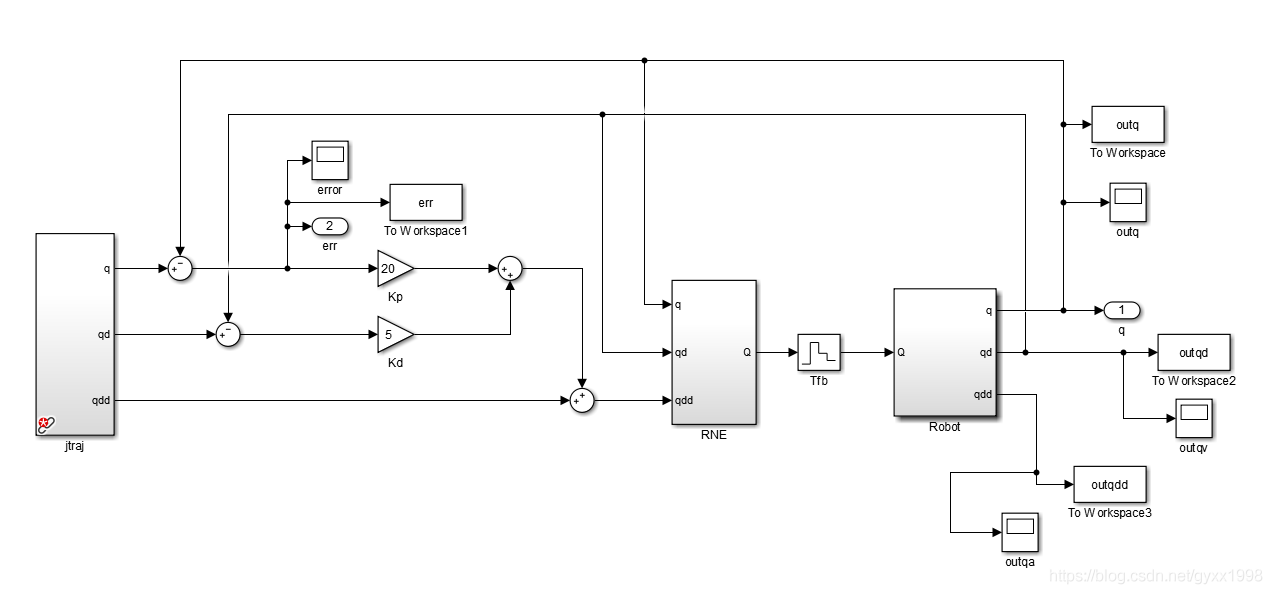
(其中的Tfb属于采样时间)
运行simulink前
先要在工作区运行一部分内容:
mdl_Dyn_5dofrobot=bot;
%For jtrajn = 5; %要求的关节角度维度,若是六自由度,n=6;ts = 0.01; %采样时间,在连续时间t之间间隔取值,因此后面的t就不要是离散点集了q0=[20 50 -30 -25 -10]*du; %初始关节角度qf=[70 10 -60 -50 30]*du; %终止时刻关节角度t =[0:0.1:8]; %完成坐标移动要求的时间[q,qd,qdd] = jtraj(q0,qf,t);%输出一个点沿一条五次多项式曲线运动随时间变化的坐标tmax = max(t);
说明:
- 通过 “To WorkSpace”模块 输出到工作区,但是是保存为timeseries格式
参考:Matlab读取timeseries的方法- .Data 获取数据
- .Time 获取时间




评论(1)
您还未登录,请登录后发表或查看评论