

一、常值:
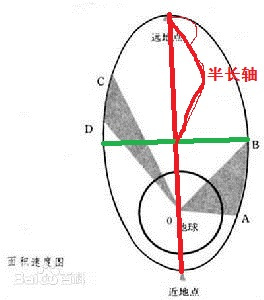
(1)半长轴(Semi-major axis):半长轴是椭圆长轴的一半长,长轴是过焦点与椭圆相交的线段长。半长轴长即是行星离主星的平均距离。半长轴的长度与半短轴的关系可以经由离心率和半正焦弦推导。
也就是平常说的:长半轴、短半轴;
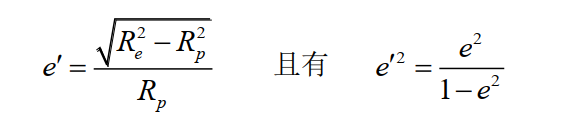
(2)偏心率(Eccentricity):
椭圆偏心率( eccentricity)(或第一偏心率) 定义为
其中:Re为椭圆长半轴、Rp为椭圆短半轴

第二偏心率定义为:
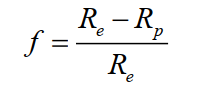
椭圆扁率(或称椭圆度, flattening) 定义为
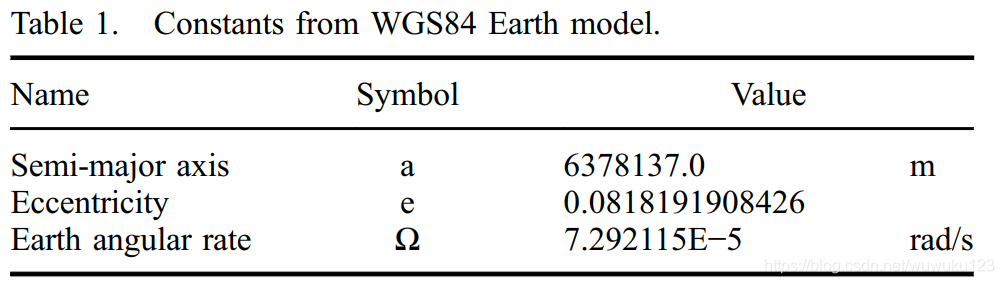
(3)地球自转角速度(Earth angular rate):
以下是WGS-84相关参数的常值:
二、国际单位制:国际单位制(符号:SI)
在国际单位制中,将单位分成三类:基本单位、导出单位和辅助单位。
7个严格定义的基本单位是:
长度(米)、质量(千克)、时间(秒)、电流(安培)、热力学温度(开尔文)、物质的量(摩尔)和发光强度(坎德拉)。
基本单位在量纲上彼此独立,导出单位很多,都是由基本单位组合起来而构成的。
辅助单位只有两个,纯系几何单位。

导出单位:
赫兹(频率的单位)——周期为 1s(秒)的周期现象的频率为1Hz(赫兹),即1Hz=1s⁻¹。
牛顿(力的单位)——使1kg(千克)质量产生1m/s²(米每二次方秒)加速度的力,即1N=1kg·m/s²。
弧度(rad)和球面度(sr)(纯系几何单位),已并入导出单位。其定义如下:
弧度(rad)——一个圆内两条半径之间的平面角。这两条半径在圆周上截取的弧长与半径相等。
球面度(sr)——一个立体角,其顶点位于球心,而它在球面上所截取的面积等于以球半径为边长的正方形的面积 [1] 。
三、惯导中常用单位
% IMU data structure:% t: Ix1 time vector (seconds).% fb: Ix3 accelerations vector in body frame XYZ (m/s^2).% wb: Ix3 turn rates vector in body frame XYZ (radians/s).% arw: 1x3 angle random walks (rad/s/root-Hz).% vrw: 1x3 velocity random walks (m/s^2/root-Hz).% gstd: 1x3 gyros standard deviations (radians/s).% astd: 1x3 accrs standard deviations (m/s^2).% gb_fix: 1x3 gyros static biases or turn-on biases (radians/s).常值零偏% ab_fix: 1x3 accrs static biases or turn-on biases (m/s^2).% gb_drift: 1x3 gyros dynamic biases or bias instabilities (radians/s).零偏稳定性/零漂% ab_drift: 1x3 accrs dynamic biases or bias instabilities (m/s^2).% gb_corr: 1x3 gyros correlation times (seconds).% ab_corr: 1x3 accrs correlation times (seconds).% gpsd : 1x3 gyros dynamic biases PSD (rad/s/root-Hz).% apsd : 1x3 accrs dynamic biases PSD (m/s^2/root-Hz);% freq: 1x1 sampling frequency (Hz).% ini_align: 1x3 initial attitude at t(1).% ini_align_err: 1x3 initial attitude errors at t(1).
参考链接:
《捷联惯性算法与组合导航原理讲义》




评论(0)
您还未登录,请登录后发表或查看评论