

上一章传送门:
本章节如果未加说明,都以转子表面贴片的永磁电机为例。
7 电流和电压波形
对于永磁同步电动机的设计,还要从电流电压波形来区分,共有两种常见的:正弦波和方形波。

【正弦电流】电动机通入正弦电流以及正弦电压,气隙磁场空间上的分布或是正弦形状或是近似方形,这对于直接接入三相电网十分合适。同步电机在恒定励磁电流下,也是典型驱动模式。
【方形电流】电动机输入方形定子电流,这意味着必须经过整流,才能调整波形。而电压波形需要调成梯形波,电流波形调成方波。方形电流可以运作在同步电动机,电流整流器,一些传感器以及无刷直流电机,电子换向直流电机等。
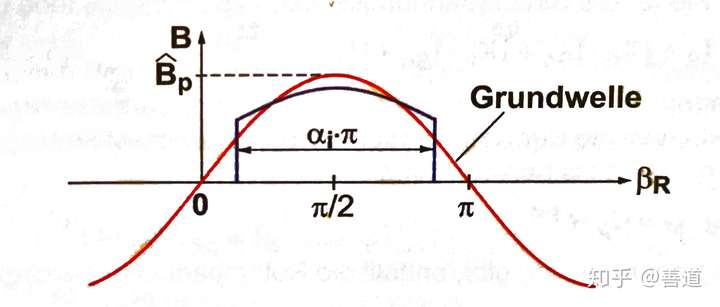
对于稳态工作时恒定转矩,必须保证吸收的功率时间上也是恒定的。因此,正弦电流驱动时,感应电压必须足够“正弦”形状。在最简单的情况下,这些感应电压形状产生于空间上也是正弦分布的气隙磁场。几乎完全方形的空间磁场分布能使电动机利用率更高,因为基波幅值被抬高了。常见情况是,永磁体平行磁化,而极覆盖率 会继续减小,如此还可以省下额外的磁体材料。定子绕组必须短距处理,以便于感应电压保持正弦波形。
正弦电流驱动下,永磁电机的工作行为原则上会和恒定电励磁的凸极或者隐极同步电机类似。
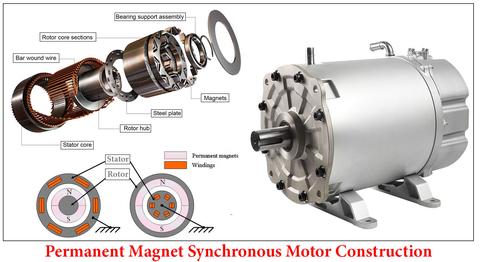
8 转子表面贴片磁体布置方法
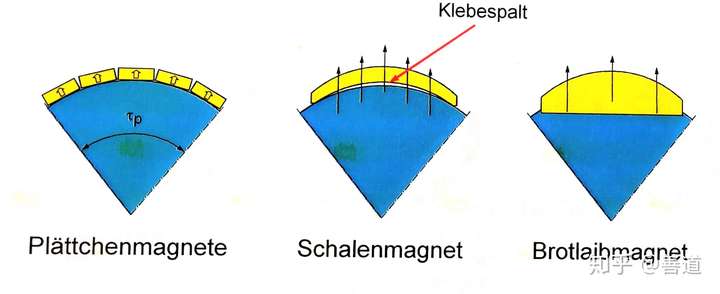
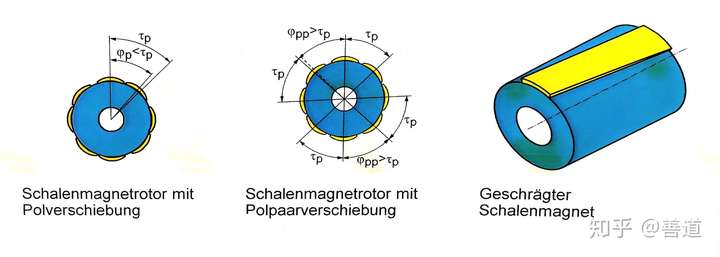
在转子表面贴片永磁体,也有如图17.2 从左到右不同贴法,左图用了事先磁化的小块磁体贴在表面。中图用了一长片磁体贴上去后再定向磁化,中间会留下一点黏贴的缝隙。右图不用完整圆柱体,而是削去一块,使之平整贴上转子。
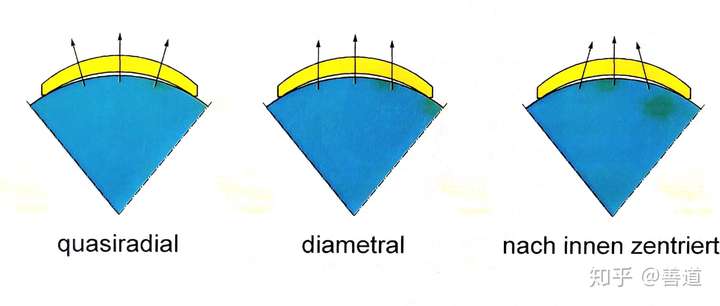
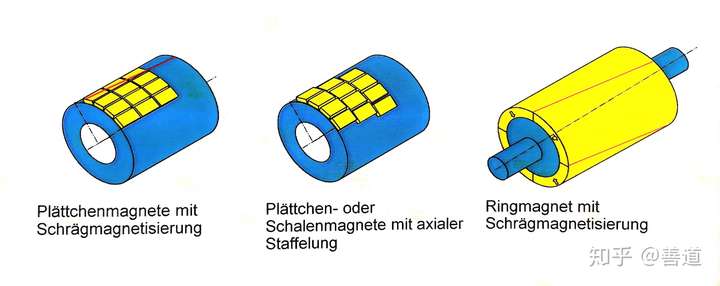
一般消除转子定子谐波的方法,主要是通过倾斜来实现。这样转子磁场和定子磁场取向就会有错位,对于永磁贴片转子,可以通过倾斜排列磁化,或者斜着贴磁片。对于长片磁体也可以做成极的小范围移位,即两个贴片中心角度略小于极宽角度。
9 永磁电机的电压方程和转矩
永磁体转子产生的也是和转子极轮纵轴相对恒定的气隙磁场,下面依然从基波考虑。
(17.1)
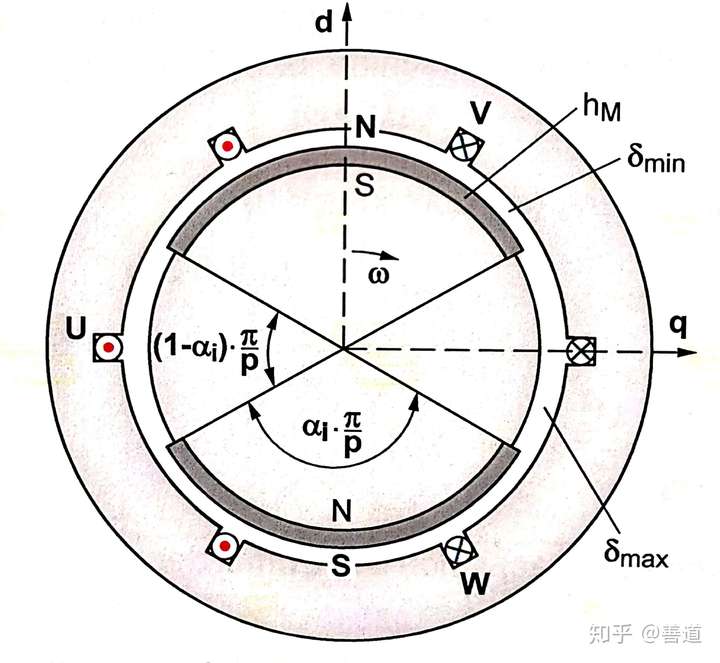
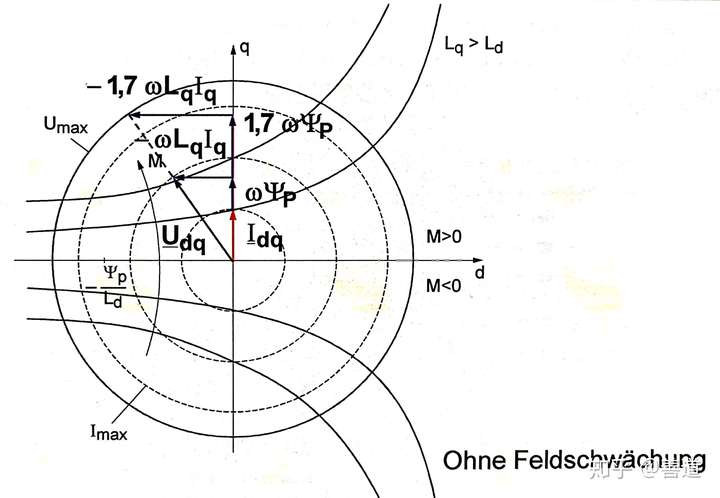
一般的永磁体的相对磁导率十分接近空气磁导率 。由于转子机械构造以及贴片磁体的排布,就像在电励磁凸极电机一样,在转子周向有不同磁导。这样就意味着在dq轴坐标下,两根磁轴上有不同的磁阻。表面贴片的永磁转子一般是
,二如果是内嵌式永磁转子则是
。如果在转子表面完全均匀分布,那么
,可以当成隐极电机。
因为永磁同步电机和电励磁同步电机本质上一样,所以可以类比直接写下磁链方程,先以凸极电机方程为例,只要磁阻一致,dq轴对称,就可以写成隐极电机方程。
(17.1)
转子磁场也可以理解为永磁转子在纵轴的等效励磁电流 激发的,而极轮电压
可以用从转子励磁电流上转换到定子上的虚拟等效电流
来表示。
(17.2)
而因为没有励磁绕组,也就没有转子电压方程了。
永磁励磁同步电机的转矩和功率,也和隐极电机、凸极电机的转矩以及功率一样。旋转磁场气隙功率和内生转矩的机械功率一样,因为不存在转差率,也不存在励磁损耗。
(17.3)
如果忽略定子电阻,可得内生转矩
(17.4)
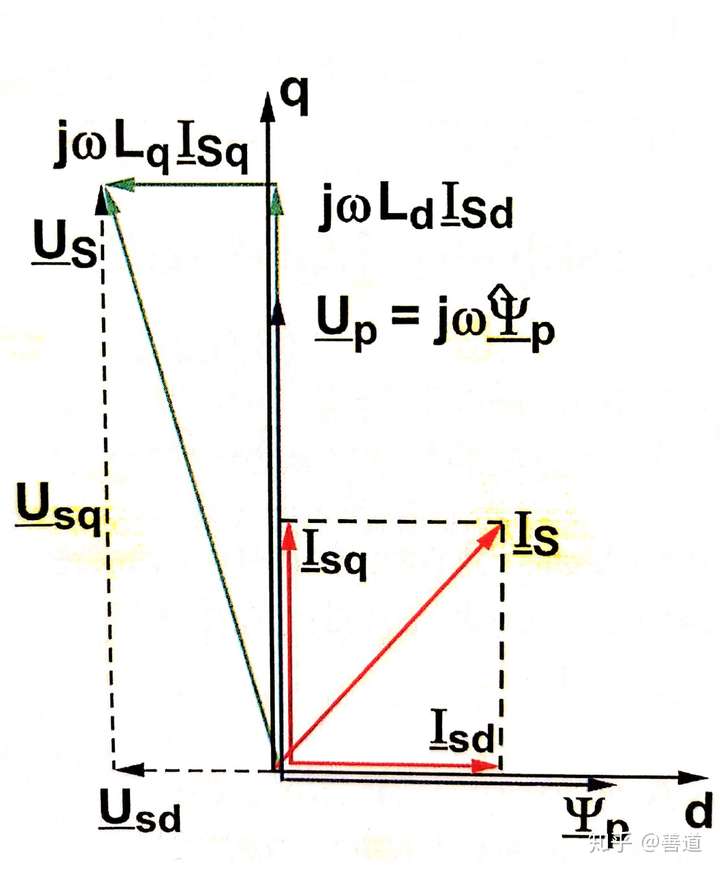
到目前为止的考察都是直接加在电网电压下。经常也会有通过整流逆变器的可变电压以及可变频率,也就是实现电机的有目标的控制。这样的驱动工作方式,如果放在转子dq坐标系里,是更合适的。即
(17.5)
因为极轮电压落在横轴(q轴)上,剩下的分量也都可以以分量的形式
(17.6)
也可以写成纯实数方程
(17.7)
对于气隙功率有,以及转矩的另一种表示方法
(17.8)
(17.9)
当电机频率恒定时,全极转矩和q轴电流正比,磁阻转矩(只有当 时)可以通过d轴电流确定。这些条件共同构成了电机控制的基础,磁场导向控制(Feldorientierte Regelung)也就是矢量控制。矢量控制可以用在连接了电流整流器的同步电动机。使用了矢量控制的驱动方式就如同他励直流电机一样了。不过基于转子坐标的矢量控制,需要转子的位置信息,这就要求在电机里装上测速的传感器,增加了系统的复杂性和成本。
10 永磁电机的弱磁增速
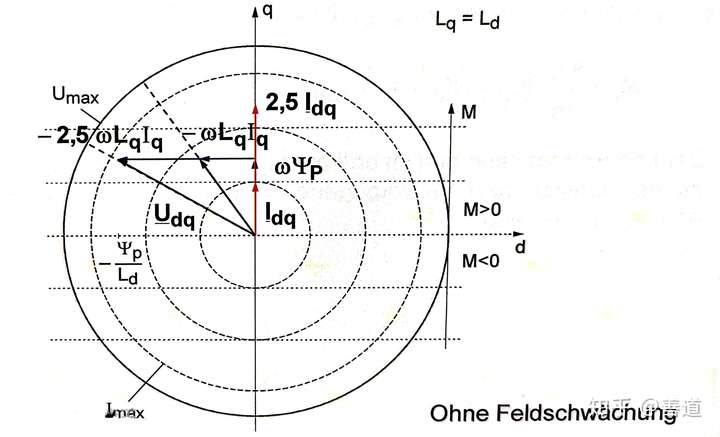
永磁同步电机也是可以通过整流电路的供电,来有限度地遏制永磁体磁场强度,达到弱磁增速的目的,如果忽略定子电阻,稳态电压方程也可以这么写
(17.10)
为永磁体励磁的磁链。上式表明,在更低转速下,要使永磁电机更接近隐极电机的工作模式,通常令
。这样定子电压分量就直接和电流频率正比,即电机转速随定子电压增长。而在转子提升到一定的转速后,就达到了整流器的电压调控极限了,这个临界点会在带负载时
比空转点来的更早一些。
从上面式(17.10)可知,通过施加额外的负的d轴电流 ,就可以使得q轴电压分量更小,即
,这样磁场就被减弱了,那么转数就可以进一步提升,这个过程可以一直持续到转矩不再足以进一步加速时为止,即使在最大电动机电流下也是如此。
而对于有 的磁非对称性的电机,首先会为了了电流最小化以及改善功率因数,施加额外的负的d轴电流
。
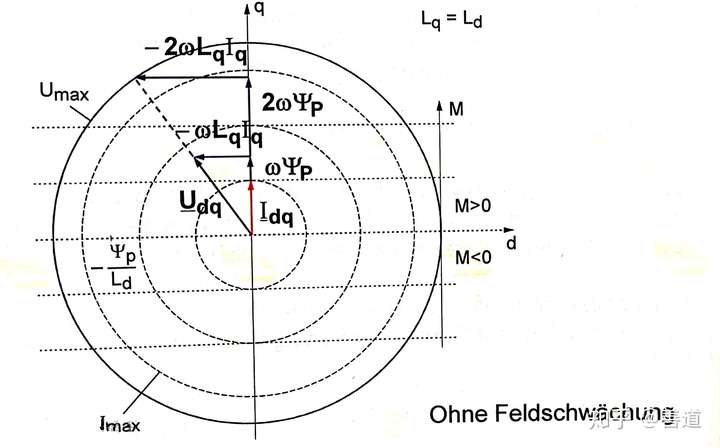
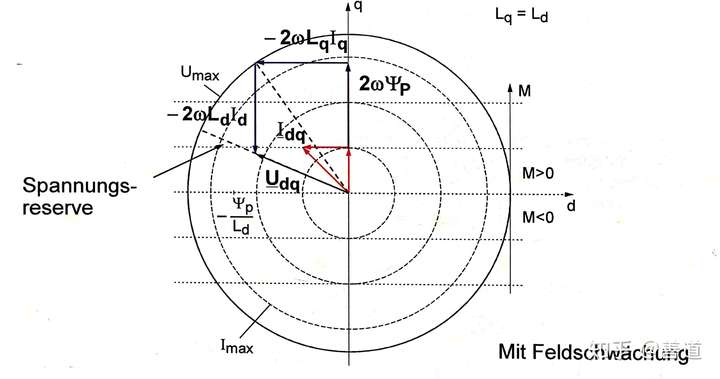
图17.10和图17.11对比,发现同样是使转子变成两倍转速,没有弱磁处理的话,定子电压很快接近最大电压极限,无法进一步增加来增大转速;而经过弱磁处理,定子电压距离最大电压还有一定的电压余量(Spannungsreserve),允许进一步增大电压来增速。
如果定子电流 大小恒定,那么只能调节电流在dq的分量,因为
(17.11)
这样转矩就会在dq相量图上形成一条类似双曲线的等转矩线,如此d轴电流就可以每每取到使转矩最大的最优值,抑或是说,在给定转矩下能吸收的总电流是最小的。
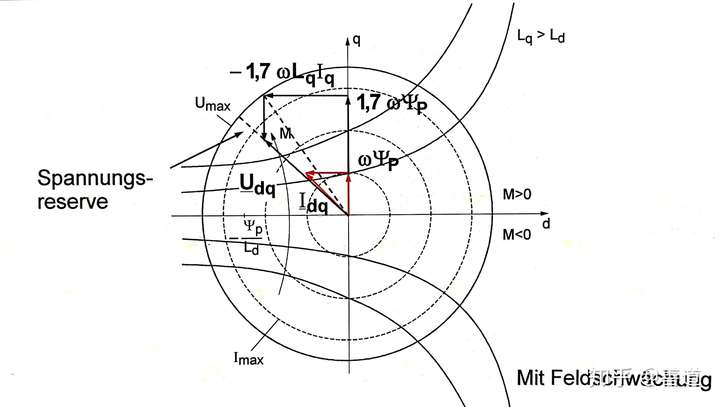
电流相量箭头与等转矩曲线的交点,表示某一确定转矩下的电流。若是想要取到最优电流,那就要求某一可达到的等转矩线上,距离原点最近距离的点 ,从原点
出发,可知定子电流
。
11 输入方形电流
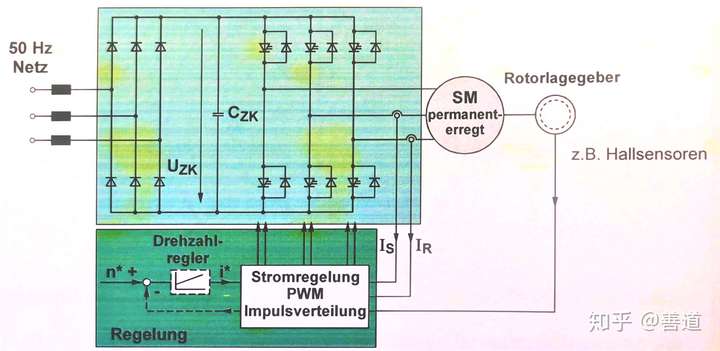
之前考察的一直都是输入正弦电流的PMSM。如果输入方形电流,那需要始终在电流整流器下驱动电机,整流信号会由经过转子位置编码器读出角度经过控制器调整输入电流方块波形。这也就是所谓的电子换向电动机(EC-Motor)。
在稳态工作时,每相电流上升下降到一个持续120°的方波平台,中间“休息”60°。由于三相电之间时间上有120°的相位差,总的输入电流(整流中间电路的电流)经过逆变器到达电动机时是恒定的了。
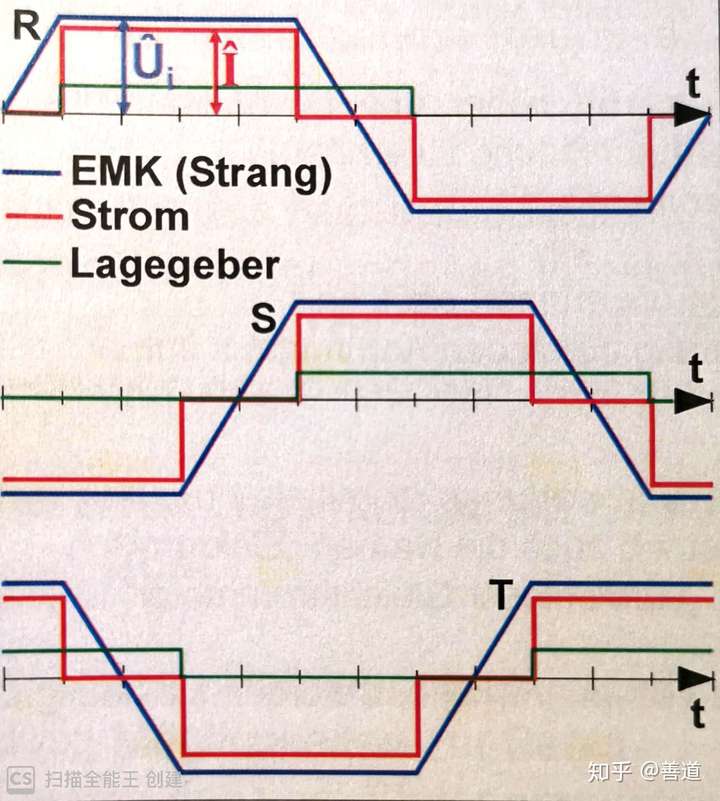
通过电流方波产生的定子磁动势,它不会再连续均匀行进,而是每每相隔60°离散的位置跳向下一个位置。当气隙磁场的空间分布(如同直流电机)也会是方形的分布时,在所有转子位置恒定的转矩会由此出现。图17.15中红线表示相电流,蓝线表示感应相电压,绿线表示编码器读出的角度。那么此时电机的气隙功率为
(17.12)
在恒定的转矩下,感应相电压必须在电流方块所在的区域保持恒定。而在电流“休息区”上的电压变化实际上却无关紧要。通过定子的一个槽宽的倾斜以及短距绕组的布置,可以在槽洞数 时产生梯形波的分布。
定子电路不断做与转子位置相关的开关通电,使得通方形电流的工作状态如同,矢量控制下的正弦电流,但方形电流不会出现最大峰值。
电机在方形电流下的有效利用率会提高15%,但是太高的转数下,电枢磁动势会猛烈阶跃,导致过高的涡流损耗以及不是方形电流的分布。输入方形电流的同步电动机很容易让人想到直流电机,其电枢电动势会总是通过换向器与励磁磁场保持垂直。
12 总结
这一章讲完了永磁同步电机的工作特性,也提到了同步电机专门的方形电流控制,还有弱磁增速控制。现在所有基本的电机类型,直流电机、绕线转子电机、鼠笼电机、隐极电机、凸极电机以及永磁电机都经过基本的介绍,讨论了各个电机的工作方式和机械构造,以及给出了电压方程,功率转矩关系等。所以,电机的原理和构造基本上都已经涉猎了。
当初是打算作为学习笔记写的,没想到要想讲清楚,还要花这么多篇幅才行。接下来有时间的话,还会继续写,写之前出现的各种电机的控制和驱动。
感谢大家,完结撒花~~




评论(0)
您还未登录,请登录后发表或查看评论