

BVH简介
BVH是BioVision公司推出的一种人体动作捕捉文件格式。这种文件以节点为核心元素,记录连续数帧内人体骨架的运动。
BVH=?
研究一个东西的时候我比较喜欢先研究它的名字。BVH可以认为是BioVision Hierarchy的缩写,因为这类文件对节点的组织是按照树形结构来的,也就是层次化(hierarchical)的。关于这个名字还有另一种可能的解释:如果你去查询Blender的文档,对BVH的介绍则将其等同于BioVision Motion Capture. 我倾向于前者,因为hierarchy这个词其实揭示了BVH的本质。
把这类文件叫做BVH有一个最单纯最直接的原因,那就是.bvh是所有这类文件的统一后缀|·ω·)
文件结构
文件分为两大部分,层级结构和运动信息。下面是BVH的一个示例:
HIERARCHY
ROOT Hips
{
OFFSET 0.00 0.00 0.00
CHANNELS 6 Xposition Yposition Zposition Zrotation Xrotation Yrotation
JOINT Chest
{
OFFSET 0.00 5.21 0.00
CHANNELS 3 Zrotation Xrotation Yrotation
JOINT Neck
{
OFFSET 0.00 18.65 0.00
CHANNELS 3 Zrotation Xrotation Yrotation
JOINT Head
{
OFFSET 0.00 5.45 0.00
CHANNELS 3 Zrotation Xrotation Yrotation
End Site
{
OFFSET 0.00 3.87 0.00
}
}
}
JOINT LeftCollar
{
...
}
...
}
MOTION
Frames: 2
Frame Time: 0.033333
8.03 35.01 88.36 -3.41 14.78 -164.35 13.09 40.30 -24.60 7.88 43.80 0.00 -3.61 -41.45 5.82 10.08 0.00 10.21 97.95 -23.53 -2.14 -101.86 -80.77 -98.91 0.69 0.03 0.00 -14.04 0.00 -10.50 -85.52 -13.72 -102.93 61.91 -61.18 65.18 -1.57 0.69 0.02 15.00 22.78 -5.92 14.93 49.99 6.60 0.00 -1.14 0.00 -16.58 -10.51 -3.11 15.38 52.66 -21.80 0.00 -23.95 0.00
7.81 35.10 86.47 -3.78 12.94 -166.97 12.64 42.57 -22.34 7.67 43.61 0.00 -4.23 -41.41 4.89 19.10 0.00 4.16 93.12 -9.69 -9.43 132.67 -81.86 136.80 0.70 0.37 0.00 -8.62 0.00 -21.82 -87.31 -27.57 -100.09 56.17 -61.56 58.72 -1.63 0.95 0.03 13.16 15.44 -3.56 7.97 59.29 4.97 0.00 1.64 0.00 -17.18 -10.02 -3.08 13.56 53.38 -18.07 0.00 -25.93 0.00
该文件是删减过的,为了显示清楚格式。>点我< 看源文件。
层级结构
首先HIERARCHY标记了层级结构部分的开始。
可以跟着编译器的思路来理解这一部分:
- 现在开始读这个文件啦,首先读到的是
ROOT,这表示第一个节点是根节点。第一个节点总是根节点; - 往下读,读到了
Hips这个词,结合上一条的信息,我们就知道了,根节点的名字是’Hips’。对于人体骨架来说,根节点一般都取在Hips也就是臀部。 - 接着,出现了
{,左括号开始了,必然有右括号}与之闭合,而括号之间的部分,既有节点,也有信息。我们可以理解为括号括起来的部分从属于刚刚读到的节点,这里是根节点Hips。 - 下面读到一个关键字
OFFSET。接下来会有三个数字,这里是0.00 0.00 0.00这表示该节点相对于父节点的偏移,也可以理解为从父节点到该节点连线所表征的向量。根节点没有父节点,所以这里是0. - 再读,读到
CHANNELS这个关键词,那么这一行剩下的部分就是几个表示自由度的关键字,XrotationYrotationZrotation表示了三个旋转自由度,XpositionYpositionZposition表示三个平移自由度。这一行表示刚才的根节点的自由度信息。- 一般来说,根节点有全部的6个自由度,而其余节点只有3个旋转自由度。
- 这些自由度的具体含义会放在后一节说明。
- 接着往下,读到了
JOINT这个关键字,这意味着这一行表示的是一个节点,后面的一个词Chest则是这个节点的名字。这个节点和根节点唯一的区别就是标记是JOINT而不是ROOT。 - 下面又出现了
{,同样的,括号内的信息和子节点都从属于该节点。 - 直到
End Site出现前的部分都不需要赘述。End Site是一个无名节点,表示树形结构到这里就是叶节点啦,后面再也没有子节点了。End Site没有子节点,所有也就没有自由度信息,只有相对父节点的偏移信息。 - 接下来读到了本文件第一个
},表示一个节点的所有范围终结。 - 下面再出现
JOINT标记的节点时,我们回去找它在谁的括号内,它就是谁的子节点,以此类推,直到MOTION结束,因为这是下一部分开始的标志。
运动信息
紧承前节,看到了MOTION这个关键字,就代表着运动信息的部分开始了。
这一部分的结构要简单的多,就不像上一节那样介绍了:
- 第二行
Frames: 2表示帧数,这里是2帧;- 这里的帧数必须与后面的帧数据行数相等,因为这个数字决定了要读取多少行,如果少了会造成数据浪费,多了就会出bug
- 第三行
Frame Time: 0.033333表示每一帧的持续时间,这里是S/30,也就是这个文件是30FPS - 后面有n行运动数据,每行为一帧。这些信息按照
HIERARCHY部分的自由度出现的顺序一一对应。其中角度的单位是度(°)
运动计算
这一部分主要解决的问题是:如何通过BVH复现运动情况。这种旋转还是很抽象,要转化就要转化成人最方便理解的形式,那就是三维坐标。
自由度理解
首先要明确的是,这些参数的含义究竟是什么。
如果在根节点ROOT建立全局坐标系,把OFFSET都作为相对这个全局坐标系的向量,那么仅凭HIERARCHY的信息是可以画出一个基本的骨架的。把这个骨架图起个名字叫G 0 ,后面还要再提到它。这种生成G 0 的方法理论上没有问题,但是不能这么理解。BVH中每个节点都有自己的局部坐标系,所有的变换都是在局部坐标系完成的。只不过在G 0 中,这些坐标系全部平行,局部坐标就等于全局坐标。注意,虽然这里我们画出了G 0,但这并不是初始的那一帧,只是一个基本的参考。运动信息部分中的每一帧都可以由这一帧的信息和G 0 唯一地生成,没有记忆性,也就是说每一帧都是独立的。BVH的每个节点都有3个或6个自由度,这些自由度都是相对于初始坐标系(暨全局坐标系)而言的。平移自由度很好理解,就是沿着三个轴的偏移量;而旋转自由度则需要牵扯到3个点:当前节点O、子节点C、父节点P。如下图
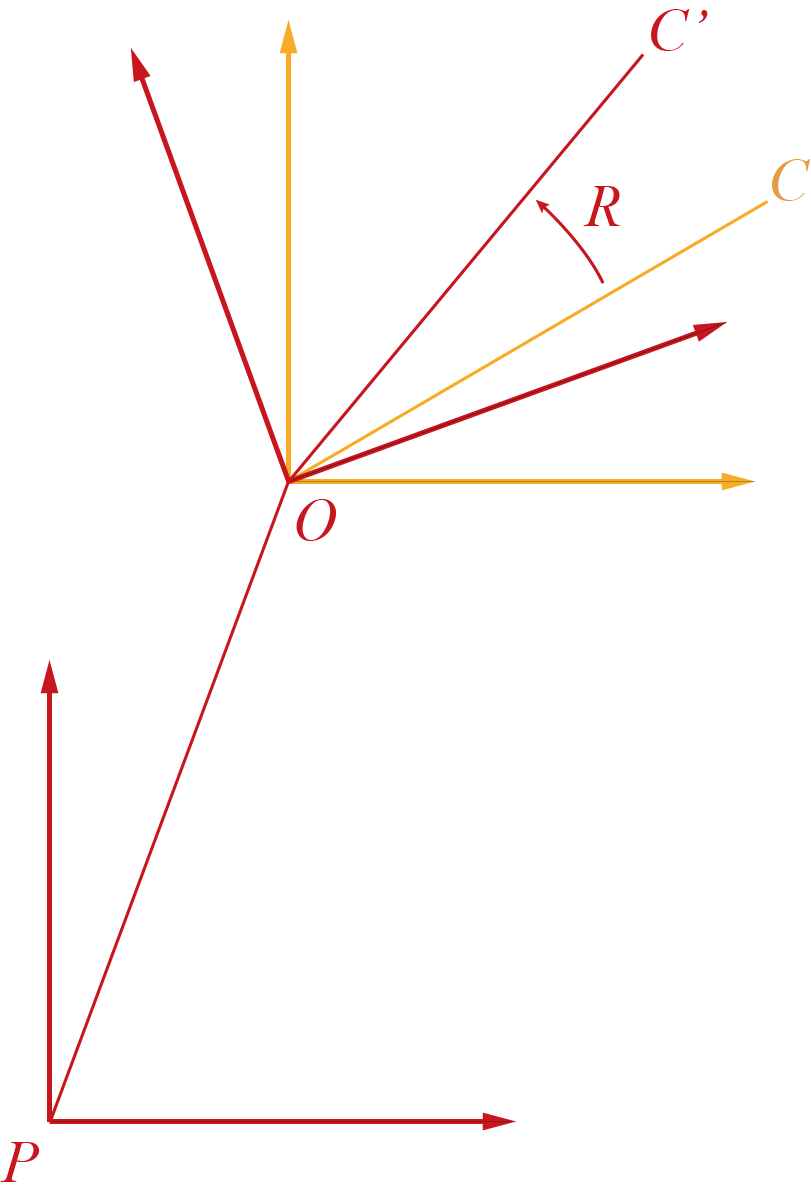
这里要第一次强调hierarchy的含义了:每个节点的旋转,在自己的坐标系旋转的同时,带动所有子节点和相关骨骼的旋转。可以理解为按照层级从根到叶先后执行旋转,一个节点的局部坐标在旋转之前,始终和其父节点的局部坐标保持平行。
按照这样一个过程,我们来理解一下旋转自由度的含义。在节点O旋转前,其局部坐标系Oxyz是和Pxyz完全平行的。三个自由度的含义是先后绕局部的Oz, Ox, Oy旋转的角度(这里以ZXY顺序为例)。注意,这里的单位是度(°).
旋转的结果不会体现在节点O上,而是体现在C及其后续节点的位移,即向量OC 的旋转。
递归计算
这一部分主要讨论如何利用BVH中给出的信息,计算出每一帧所有节点的三维坐标序列。其核心是坐标变换的递归。
这里要再一次强调hierarchy这个词。递归计算的核心就是对层级结构的利用。我们知道,如果一个坐标系p旋转之后得到了坐标系q,这一旋转过程的旋转矩阵可以表示为R pq ,而在这个空间内有一定点A,它在两个坐标系下的坐标分别是A p 和A q ,那么有如下关系成立:
这就是坐标变换公式。
这里就有问题了。BVH中的旋转是向量在旋转,这个公式中A点根本就是一个定点,怎么能用来计算呢?
其实在前一节,我们赋予了每个点一个单独的局部坐标系,并规定这个坐标系内,直接后继的坐标是不变的。这就是为了将坐标变换和向量旋转等同。可以分几步来理解这个计算过程(以父节点的坐标系为基准):
- 转之前的橙色坐标系(
 所在的坐标系)记为p, 转之后的红色坐标系(
所在的坐标系)记为p, 转之后的红色坐标系( )记为q。
)记为q。 - 旋转前,所有坐标系都与全局坐标系等同,这就使得
 实质上是 在全局坐标系下的坐标,也就是我们直接可以从坐标序列得出的V g。旋转后的坐标系下,同一个向量在q下的坐标实质上是基准帧内该向量的坐标,即V。
实质上是 在全局坐标系下的坐标,也就是我们直接可以从坐标序列得出的V g。旋转后的坐标系下,同一个向量在q下的坐标实质上是基准帧内该向量的坐标,即V。 - 于是有了
V g = R V
我们再来理解递归的过程:在基准帧,当前节点以其父节点为基准执行旋转,得到向量R n V,这一向量的坐标是相对其父节点而言的;那么以父节点作为待处理的节点,继续执行这个过程,有了R n−1 R n V,以此类推。于是,某一节点的局部坐标到全局坐标的转化矩阵就可以写
为了不让这个式子看起来太复杂,我没在公式里显式指明旋转矩阵所在节点的从属关系。但是他们之间的关系应为:R i+1 是R i的子节点。
有了这个关系,R n 就可以递归求解。即,当我们知道R n 节点所有祖先节点的旋转矩阵,他们按照上面的顺序乘在一起得到的结果是R m, 则成立以下式子:
式中只有R n 是未知的。
一个很棒的库:bvh-converter
安装和基本使用
最最最实际的问题,当然还是怎么把上面的理论变成程序。这其实包含了两个方向:从 BVH 变成三维坐标,和从三维坐标变成 BVH.
第二个方向牵扯到很多细节上的东西,很难给出统一解答,而第一个方向则是很容易实现的。没错,这里要说的这个库就是做这个方向的转化的。这个库名叫 bvh-converter,其 GitHub 地址是 https://github.com/tekulvw/bvh-converter 。
十分方便的是,这个库是加入 PyPI 的,这就意味着安装只需要一条命令:
pip install bvh-converter
更方便的是它的使用,你甚至不需要在 Python 文件里导入这个库。安装之后,只需要在命令行或者终端里键入:
bvh-converter <filename>
看到下面的输出,这就意味着转化成功了。
之后,你就会在命令行 / 终端当前目录下得到一个 csv 文件,这个文件就是转化后的三维坐标序列。转化后的 csv 文件的第一行是项目标题,纵向则是时间序列。项目标题除了第一列的时间是 Time 以外,后面的标题格式都是 <joint_name>.<X / Y / Z>,表示原本 <joint_name> 关节的三个坐标。对于 End Site,其格式则是 <joint_name>End.<X / Y / Z>。
其他
此外,这个库还有别的用法。如果你安装之后报错说找不到这个库,而 pip list 可以找到这个库,安装是成功的,那么可以试试下面这条命令,指定其作为 Python 库运行:
python -m bvh-converter <filename>
如果你希望同时输出旋转信息,那么用这条命令
bvh-converter -r <filename>
之后你会在当前目录下看到多了两个 csv 文件,一个是三维坐标序列,另一个则是各个关节点的欧拉角序列(也就是 bvh 里面存储的那个)。
The End
感谢评论区朋友的补充呀,补充了 bvh-converter 这个库的用法。
文章内容依然是基于我个人理解,如有错误,万望指正。
开学了,要收拾好心情:)



评论(1)
您还未登录,请登录后发表或查看评论