
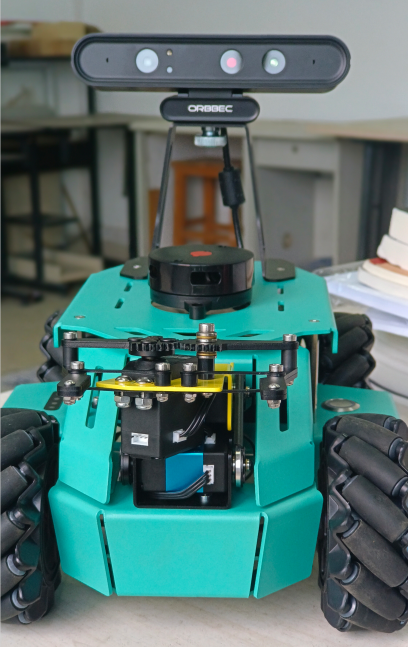
大家好,这次来做一个松灵Limo-S2的开箱介绍。
话不多说,直接上图。
接下来给大家描述一下我拿到机器后这两天的整个体验过程。
开箱
收到快递后,我迅速把它带去了实验室,进行了一个简易的开箱仪式。
开箱后,映入眼帘的是两层机器组装零件,组装工具和一些传感器。
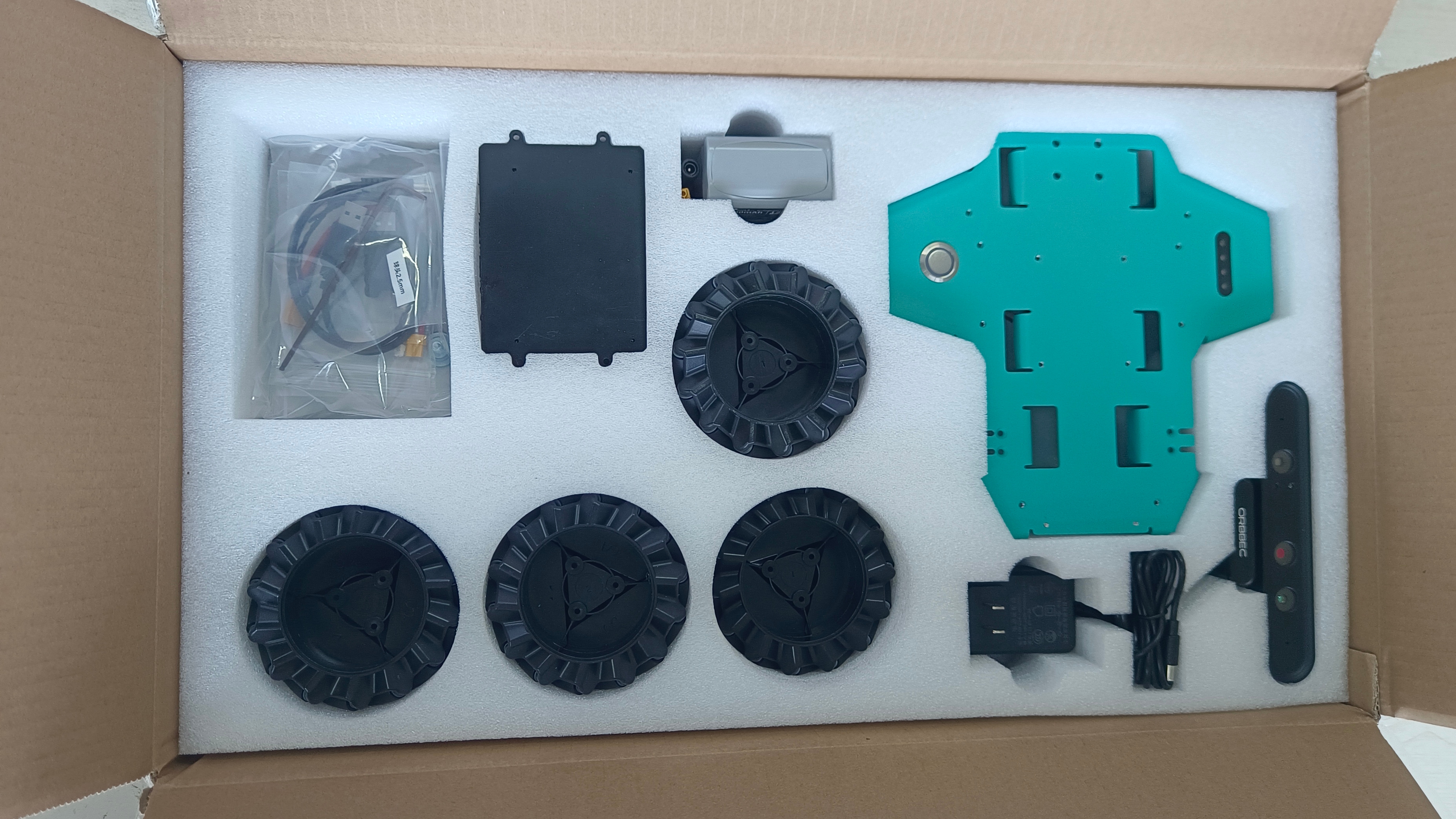

(不得不说,堆料真足,连外壳都是全铝制品,良心商家啊)
开发环境
由于在拿到车车之前,我已经从松灵的工程师那边拿到了开发文档了解到它已经内置了ubuntu系统,而作为一个开发人员,相比于它的硬件组成,我更关注的是它的开发环境和开发性能,所以我还未开始组装机器便先进入了其系统。
按照官方推荐,我使用的软件是 nomachine ,连接进去是一个标准的 ubuntu 系统,且内置了一些预备程序,包括底层驱动,上下位机驱动和一些基础的slam和导航案例。

不过,在进入之后,出了一点小问题,简单判断之后猜测是 nomachine 分辨率设置问题,所以直接更改修改。
xrandr --fb 1920x1080
重启 nomachine 之后即恢复正常。
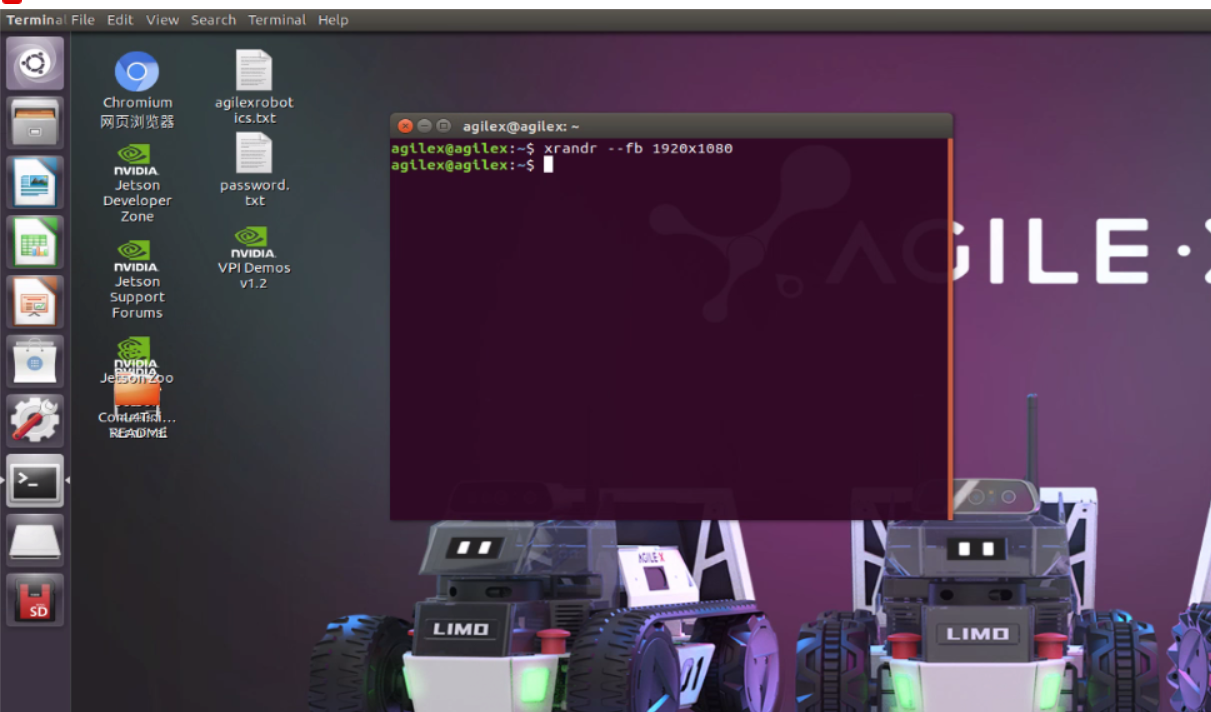
噢,对了,关于用户名和密码,用户名为:agilex;密码为:agx,可见桌面文档(手动狗头)。
硬件组装
见识了开发环境,我已经迫不及待开始上手启动一下它的预备程序了。但是在这之前,我得先把机器组装起来。
一开始,我并没有找到一些说明书和链接帮助我去拼装,后来通过询问小伙伴,我拿到了一个链接。知道了之后马上开干吧,但是依旧遇到了不少坑。
1、车轮及其线路连接
其实松灵已经做的很良心了,在每一个车轮上都标上了 id 号。

按照我对麦轮的了解,对角方向为同相。所以id为 1和2 的标号肯定不能在一边。满是疑惑的我立刻和小伙伴们展开了讨论,最终在松灵工程师的帮助下了解到了正确的连法。

即,从右上角开始顺时针旋转,即为1234。
2、连线问题
在组装过程中,我最害怕的问题就是连错了线路,毕竟轻则程序启动失败,重则直接炸机,所以在未开始之前便想和小伙伴们讨论。后来在商品栏发现了这张图。
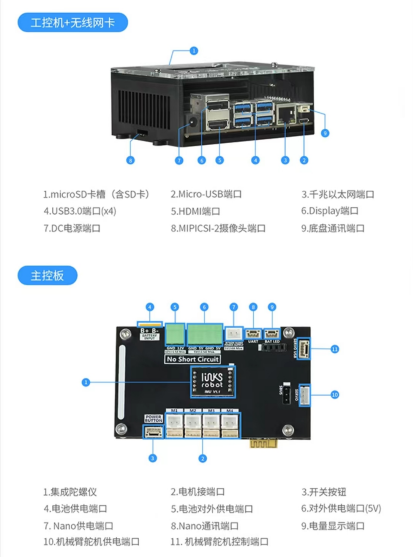
最终解决问题。
蓝牙控制
在组装完机器后、见识完开发环境之后,而且目前在车车上没有可视化界面。所以我先第一步先从蓝牙控制开始。先从官方文档中找到相关信息。

安装成功之后便开始搜索蓝牙信号,总体连接的很顺畅。先看主界面

连接之后发现 LIMO-S2 同 LIMO 一般有三种模式,阿克曼、差速和麦轮。通过左右两边的轮盘可以控制小车前后左右移动,关于三种模式的启用模式相信大家也比较了解,此处不过多赘述。
此外,蓝牙app还有第二个界面
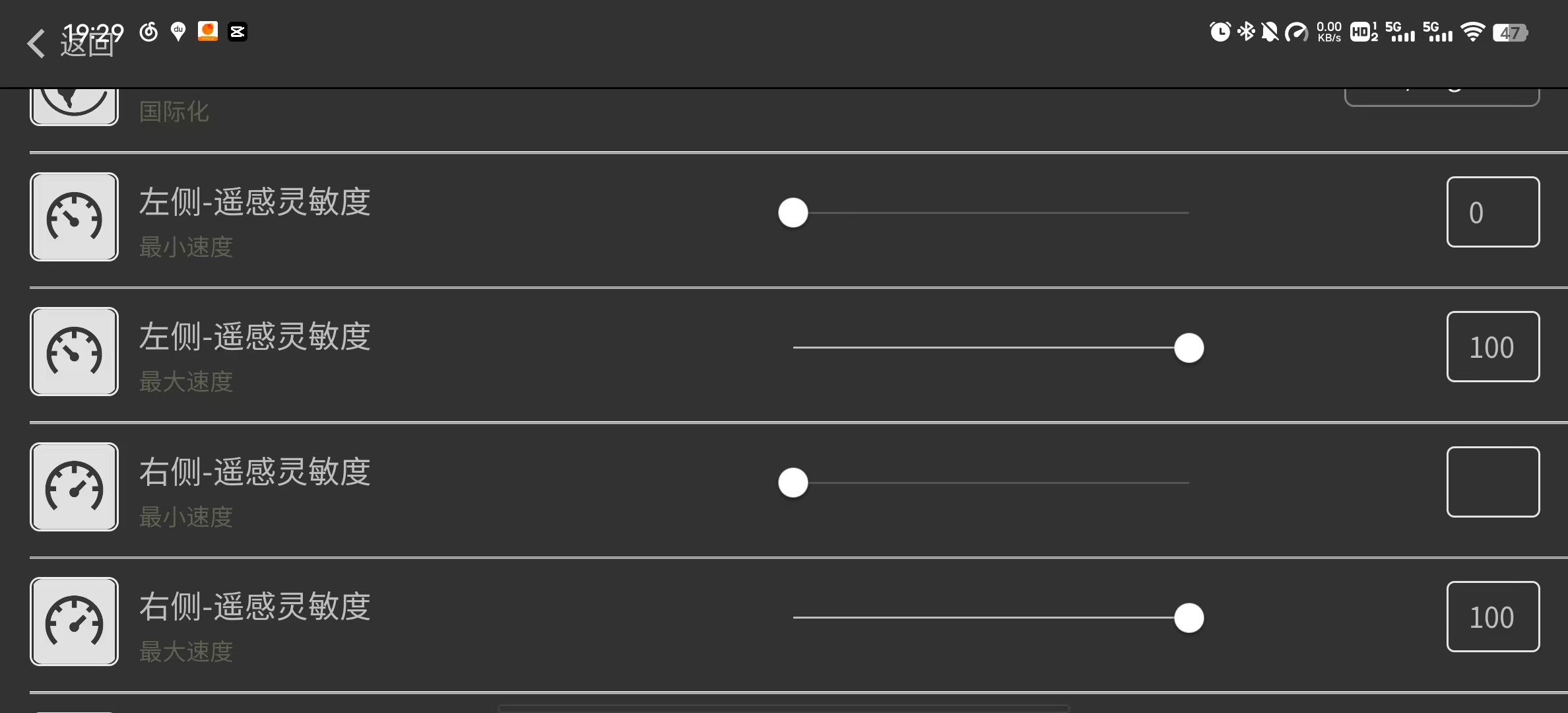
在这个界面中,可以调整左右轮盘的灵敏度和对小车进行线速度和角速度的标定。(这点的用处还是很大的)。
测试预备程序
1、底盘驱动和按键控制
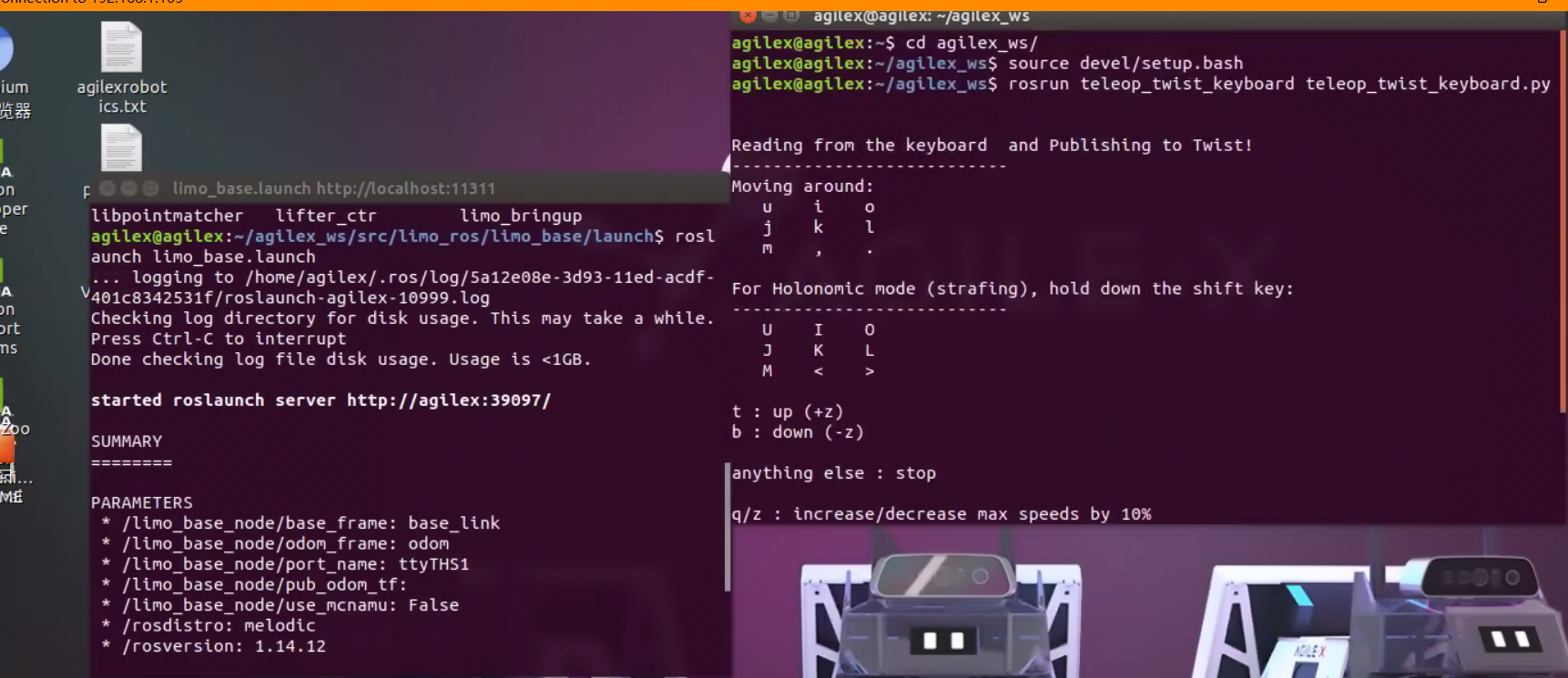
车车的大部分 launch 文件都放在 agilex_ws/src/limo_ros/ 中,在 limo_base 中,我们可以找到 limo_base.launch 文件,这就是车车的上下位机驱动程序啦。
roslaunch limo_base limo_base.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
运行以上程序即可按键控制车车,这里也可以测试硬件是否连接正确。
2、建图雷达功能测试
这里,不知道是不是我这边机器的原因,我的雷达数据一直采集不到。所以我先将雷达拆下来在我电脑上进行了测试。发现是有数据的。
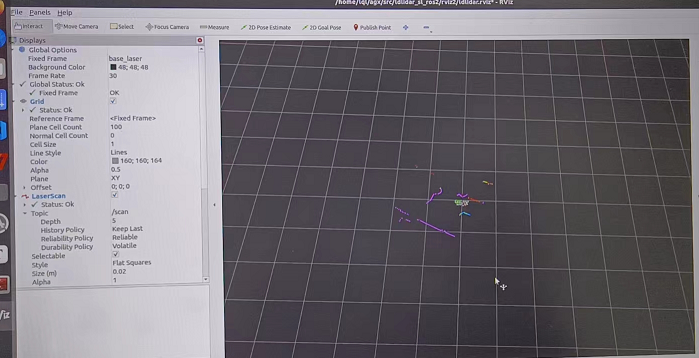
所以我对车车的雷达驱动包下手了。示例代码如下
sudo apt-get install git
mkdir -p ldlidar_ros_ws/src
cd ~/ldlidar_ros_ws/src
git clone https://gitee.com/ldrobotSensorTeam/ldlidar_sl_ros.git
#这里主要给串口权限
cd ~/ldlidar_ros_ws
catkin_make
cd ~/ldlidar_ros_ws
source devel/setup.bash
roslaunch ldlidar_sl_ros ld14.launch
#开新终端
rosrun rviz rviz
#即可显示
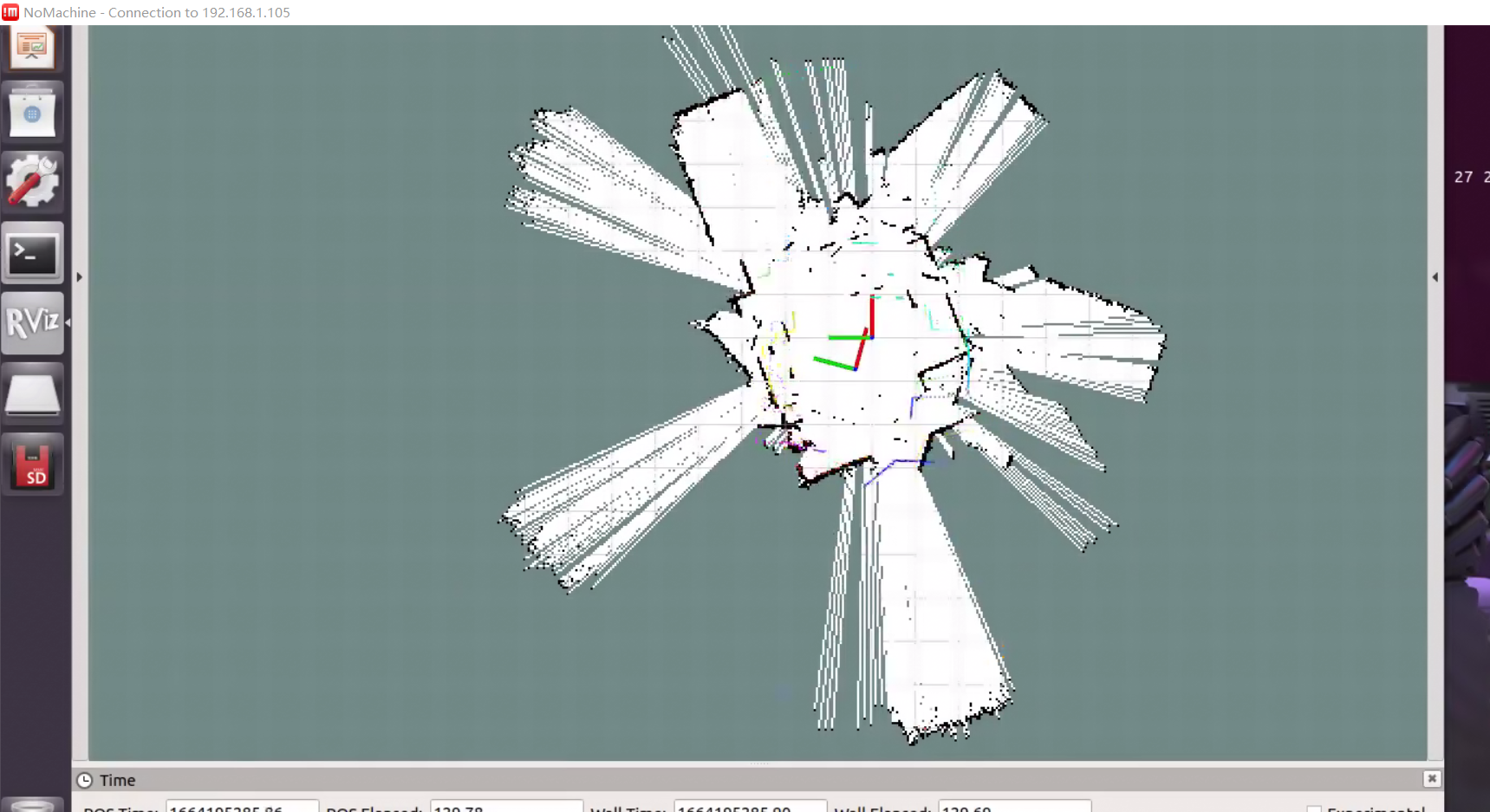
雷达问题解决后,便开始建图吧
先试试 gmapping
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false
roslaunch limo_bringup limo_gmapping.launch
运行后如图
cartographer与之类似:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false
roslaunch limo_bringup limo_cartographer.launch
3、深度摄像头
此功能模块在车车中有一个 astra_camera 功能包,此处我是用文档中的历程时发现只能显示深度信息而没有rgb信息,故重新启动
roslaunch astra_camera astra_pro.launch
成功启动rgb信号。
总结
整体来看车车是真不错,外观上做的很精致且耐撞,软件上堆料也十分充足,很适合新手做开发测试,也很适合研究者做进一步的研究。做学习和二次开发都是很合适的。
")


评论(0)
您还未登录,请登录后发表或查看评论