

前言
本文介绍ADAMS在运动仿真过程中,运动数据的导出及导入,以并联机器人动力学仿真为例,主要包括三方面内容:
- ADAMS仿真得到的运动数据如何导出?
- 如何将外部的关节运动数据导入ADAMS作为输入?
- AKISPL函数使用方法。
提示:本文以ADAMS并联机器人仿真为例讲解,可点击下方链接了解
https://blog.csdn.net/yuyu_94/article/details/123941337
一、ADAMS仿真得到的运动数据导出方法
运行仿真,在ADAMS中得到需要的仿真运动数据。
这里以Joint_11为例,通过测量得到Joint_11的运动数据
随后进入后处理界面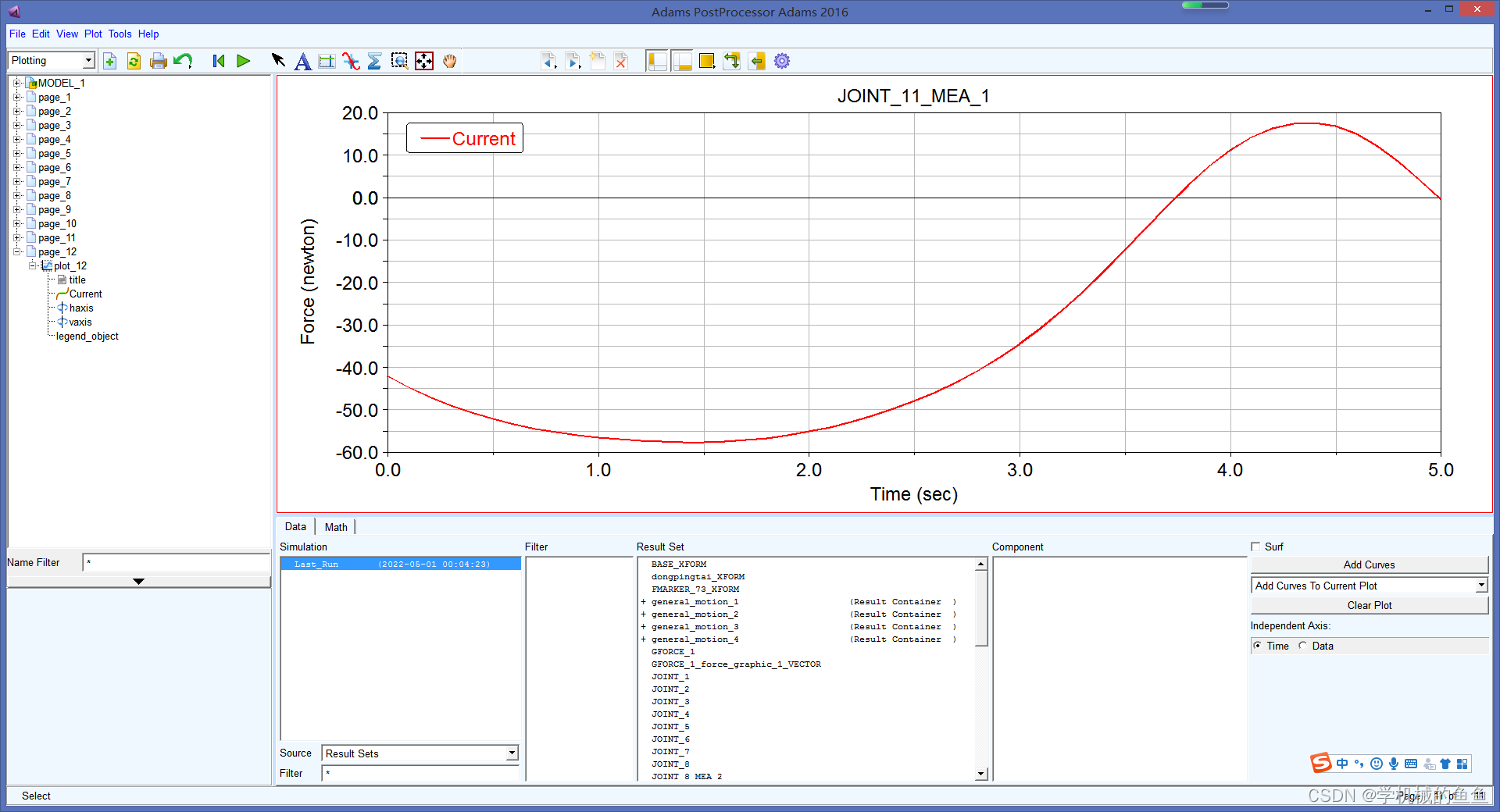
依次选择右上角
File-Export-Table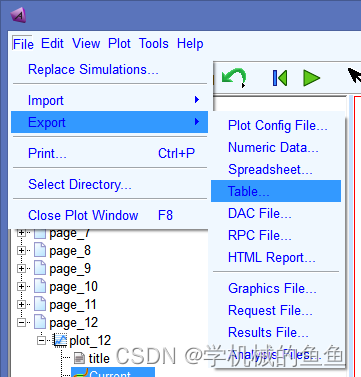
然后设置如下,注意箭头这里的File Name需要自己输入,我觉得这也是ADAMS比较反人类的地方……
Plot这里选择你需要输出的Plot,本例中Joint_11的数据在Plot12下,故选择Plot12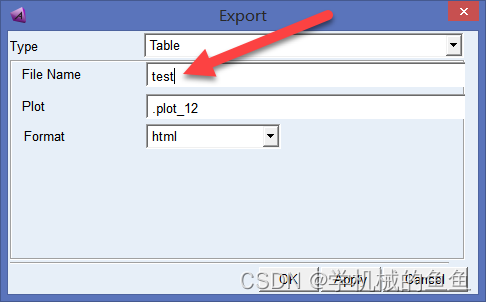
点击Apply,就输出得到了test.htm文件,双击打开之后如下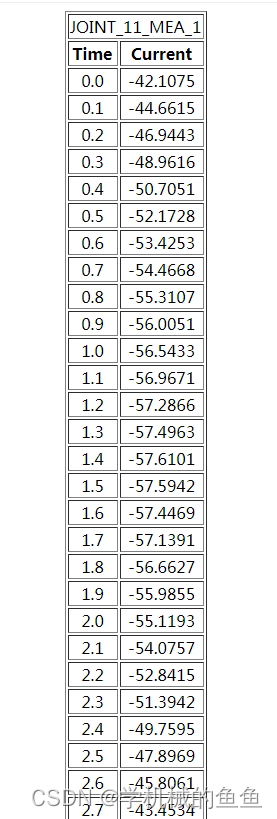
得到数据可以复制到Excel或者Matlab中进行其他处理。
**至于除了Table以外的几种文件格式,笔者还没用到,如果你有需要或者Table格式不能满足你的需求,可以评论区留言我们一起探讨研究。**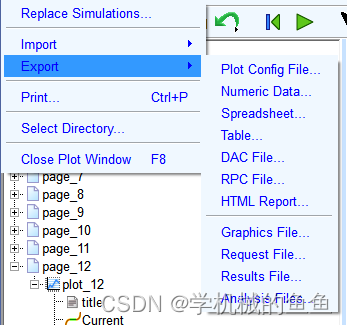
二、外部的关节运动数据导入ADAMS的方法
除了将ADAMS仿真的数据导出,另外一种经常遇到的场景是,将外部的数据作为关节数据或者力数据等导入ADAMS作为输入。
我们在EXCEL中有一组时间–位置序列,将其关节运动数据导入ADAMS。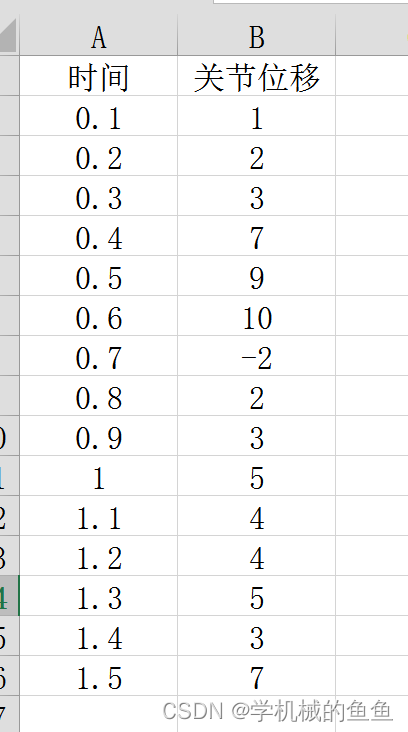
点选如下按钮,选择新建Spline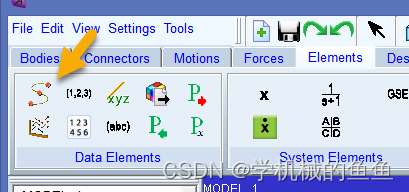
笔者新建得到的SPLINE为SPLINE_5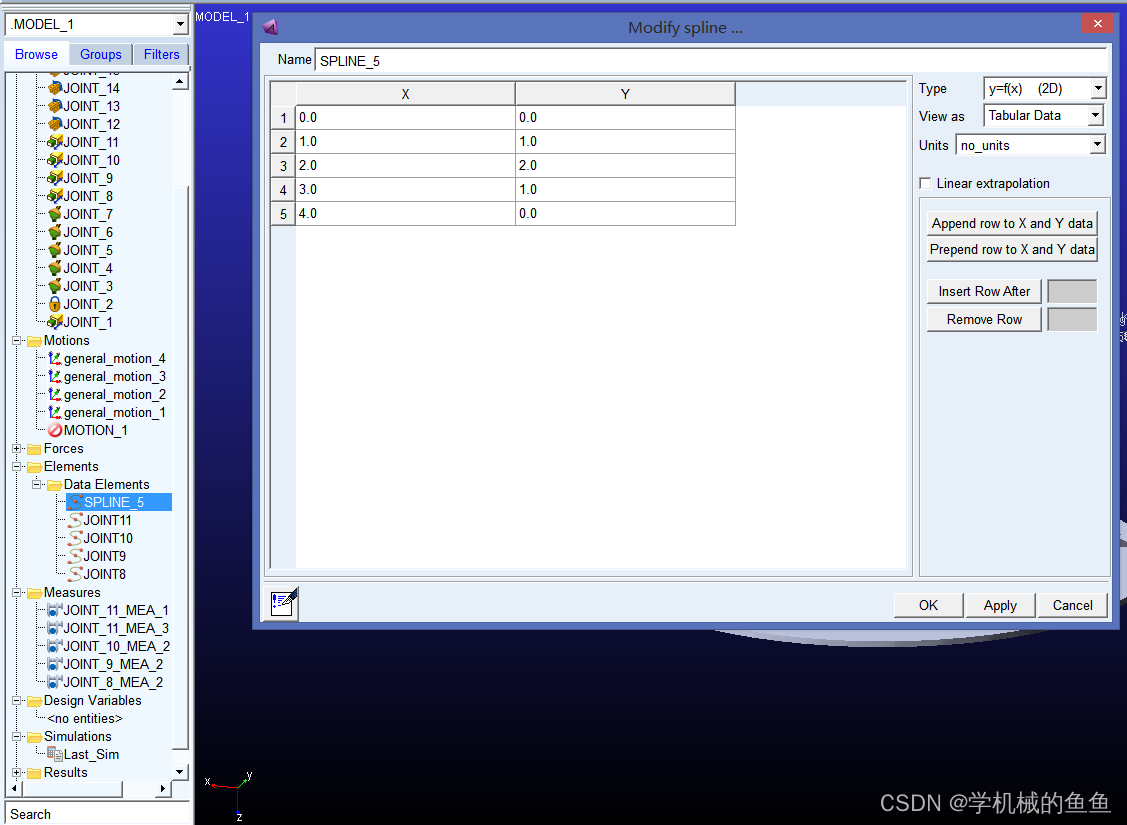
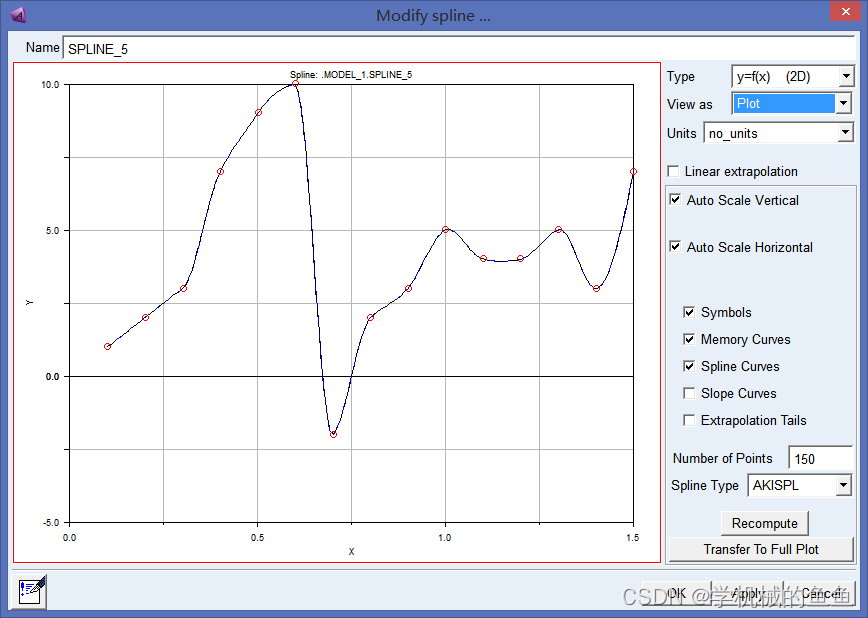
将EXCEL中的数据粘贴到上图的表格中,点选View as选择Plot可以切换为图线视图。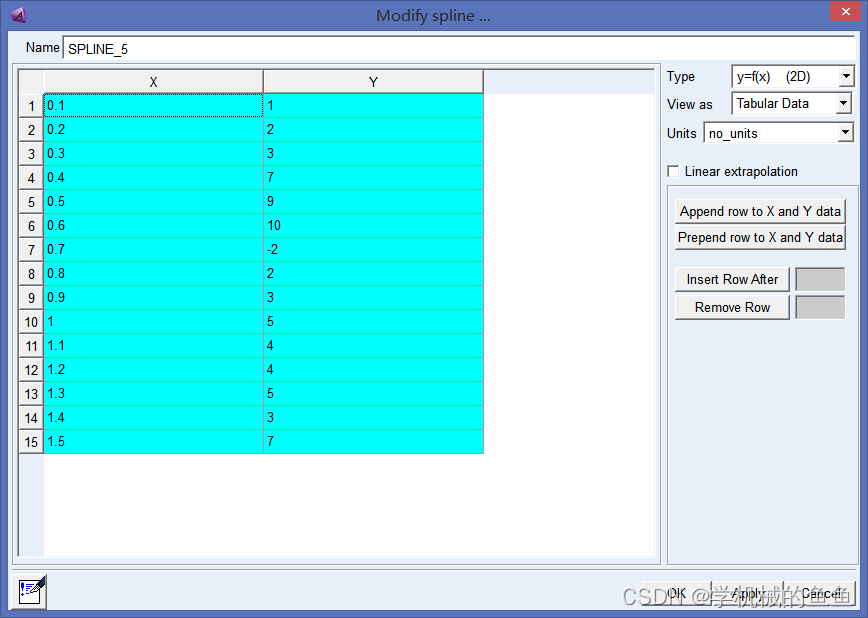
如果需要将导入的关节运动数据应用于某个关节,这里需要用到AKISPL函数,将关节的运动函数修改为
AKISPL( time , 0 , SPLINE_5, 0)
因为导入时建立的名称为SPLINE_5,故函数中为SPLINE_5,可以使用其他名字,两者对应即可。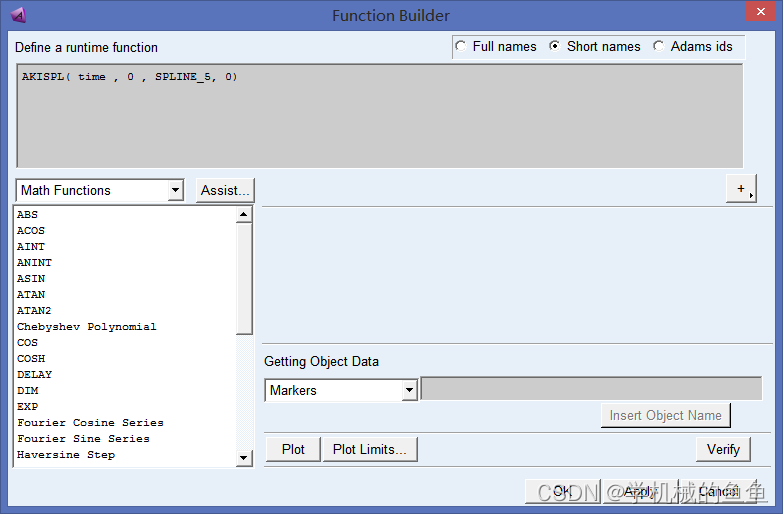
这样就完成了外部数据导入,细心的同学应该发现了,在ADAMS并联机器人动力学仿真源文件中,四个移动关节使用的就是AKISPL函数。
如果还有疑问,欢迎评论区留言讨论。




评论(0)
您还未登录,请登录后发表或查看评论