

1、融合流程
1.1、状态方程(求F和B)
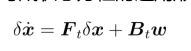
状态方程一般形式如下(是一个微分方程)x服从一个高斯分布
状态量由预测给出(本例中是由IMU预测)
其中
状态量的误差

状态量误差的微分形式为

所以他们的转换矩阵F为

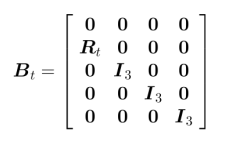
IMU自身误差

加速度误差,角速度误差,bias误差

除加速度误差与状态量相差一个旋转矩阵外i,其他均无关,所以B为
1.2、观测方程(求G和C)
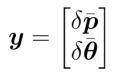
观测方程一般形式

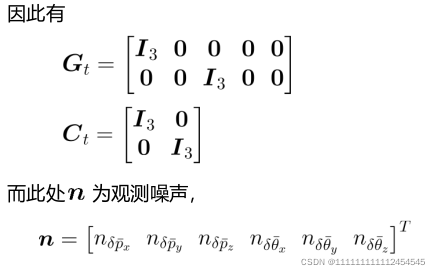
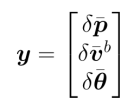
y为观测,包括位置和失准角
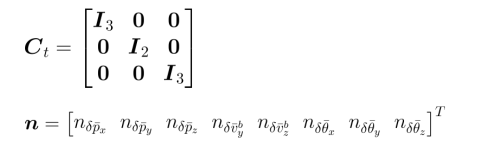
观测量与状态量的一三项相同,其他无关,误差项n为其在xyz的分量
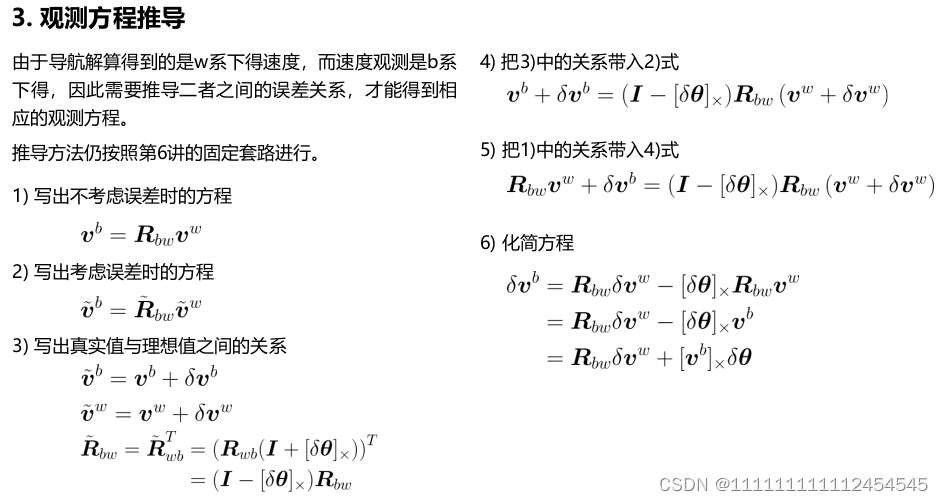
1.3、观测方程中加入编码器
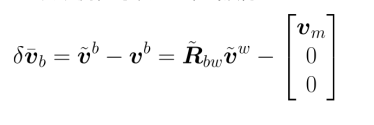
编码器观测的是在b系下观测的线速度加入到观测方程后为观测变为
其中第二项需要推导其与状态量误差的关系
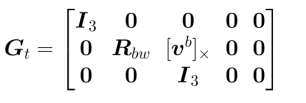
所以新的G矩阵为在原来的基础之上加上编码器观测的线速度的转换关系
矩阵C为误差关系矩阵为单位矩阵即可
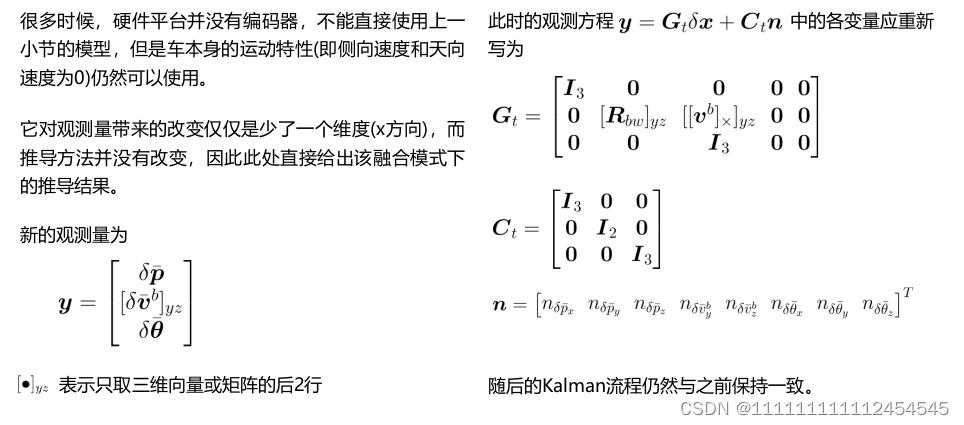
1.4、 在观测方程中加入运动约束
1.5、卡尔曼预测更新
在得到预测方程的F和B以及观测方程的G和C之后就可以进行卡尔曼滤波了;在这之前还要进行初始化和惯性解算,此处就不介绍了
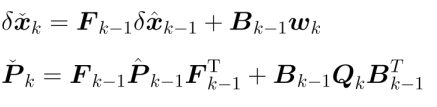
第一个方程意义:已知k-1时刻的状态误差项,可以通过F和B预测出此时的状态误差项
第二个方程意义:已知k-1时刻状态量误差分布的协方差矩阵,以及误差项分布协方差矩阵,可以预测出k时刻的协方差矩阵;

蓝色代表k-1时刻,我们通过预测得到了k时刻状态量误差(粉色部分);但这并不一定非常准确所以我们需要用观测方程来进一步修正他
1.6、加入观测后更新
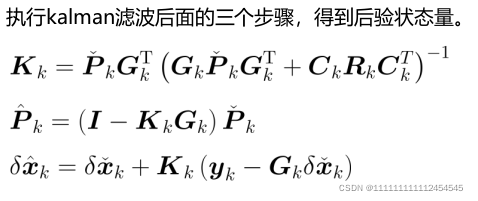
首先第一个式子:通过PK(下尖)(代表通过预测得到的k时刻的协方差也叫先验)和G,C,R得到卡尔曼增益。
再计算出后验协方差矩阵Pk(上尖)和后验状态量误差(分布的均值)
后验用图形可以表示为
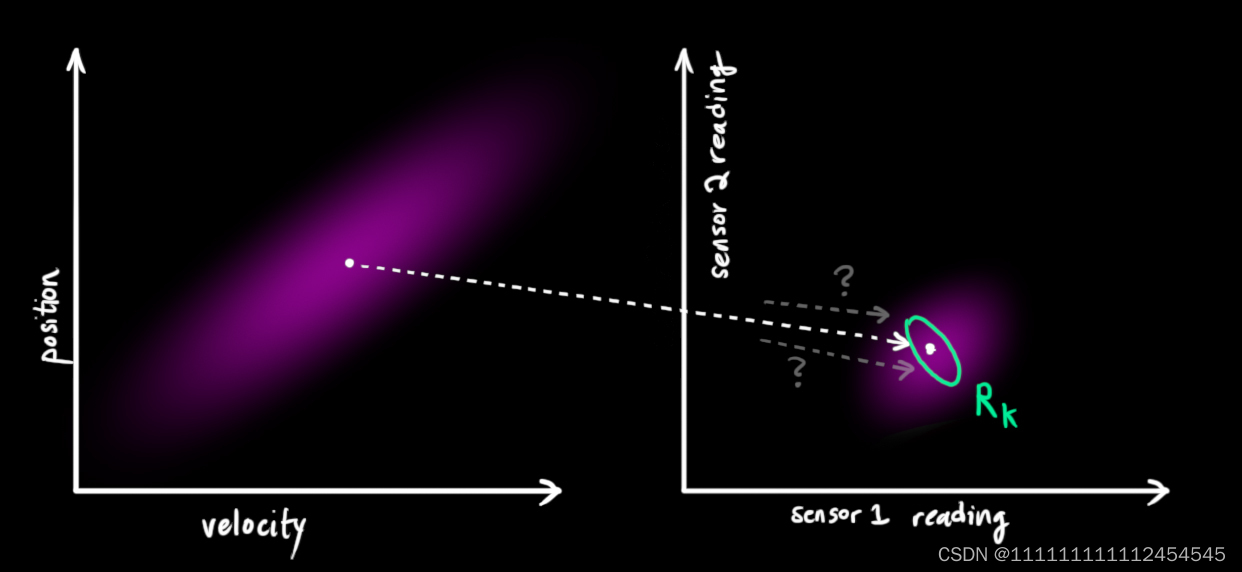
两者融合
如果没有后验等于先验(左侧是后验右侧是先验)
1.7、计算后验位姿与状态量清零

2 、作业
本次作业与上一章相似,只有少部分不同
在观测方程中加入运动约束,其他不变
2.1、融合编码器
void ErrorStateKalmanFilter::CorrectErrorEstimationPoseVel(
const Eigen::Matrix4d &T_nb, const Eigen::Vector3d &v_b, const Eigen::Vector3d &w_b,
Eigen::VectorXd &Y, Eigen::MatrixXd &G, Eigen::MatrixXd &K
) {
//
// TODO: set measurement:
//
Eigen::Vector3d v_b_ = v_b; // measurment velocity (body 系) , 融入速度 (vx 取自 惯导)
Eigen::Vector3d dp = pose_.block<3, 1>(0, 3) - T_nb.block<3, 1>(0, 3);
Eigen::Matrix3d dR = T_nb.block<3, 3>(0, 0).transpose() * pose_.block<3, 3>(0, 0) ;
Eigen::Vector3d dv = pose_.block<3, 3>(0, 0).transpose() *vel_ - v_b_ ; // delta v 严格意义上来说,这里的观测是,惯导给的vx
// TODO: set measurement equation:
Eigen::Vector3d dtheta = Sophus::SO3d::vee(dR - Eigen::Matrix3d::Identity() );
YPoseVel_.block<3, 1>(0, 0) = dp; // delta position
YPoseVel_.block<3, 1>(3, 0) = dv; // delta velocity
YPoseVel_.block<3, 1>(6, 0) = dtheta; // 失准角
Y = YPoseVel_;
// set measurement G
GPoseVel_.setZero();
GPoseVel_.block<3, 3>(0, kIndexErrorPos) = Eigen::Matrix3d::Identity();
GPoseVel_.block<3, 3>(3, kIndexErrorVel) = pose_.block<3, 3>(0, 0).transpose();
GPoseVel_.block<3, 3>(3, kIndexErrorOri) = Sophus::SO3d::hat( pose_.block<3, 3>(0, 0).transpose() *vel_ ) ;
GPoseVel_.block<3 ,3>(6, kIndexErrorOri) = Eigen::Matrix3d::Identity();
G = GPoseVel_;
// set measurement C
CPoseVel_.setIdentity();
Eigen::MatrixXd C = CPoseVel_;
// TODO: set Kalman gain:
Eigen::MatrixXd R = RPoseVel_; // 观测噪声
K = P_ * G.transpose() * ( G * P_ * G.transpose( ) + C * RPoseVel_* C.transpose() ).inverse() ;
}与仅有雷达观测时有几处不同
观测量y不同,添加了编码器观测的线速度。G不同,C也进行了扩充,不过还是单位矩阵
YPoseVel_.block<3, 1>(0, 0) = dp; // delta position
YPoseVel_.block<3, 1>(3, 0) = dv; // delta velocity
YPoseVel_.block<3, 1>(6, 0) = dtheta; // 失准角
Eigen::Vector3d dv = pose_.block<3, 3>(0, 0).transpose() _vel_ - v_b_ ;
GPoseVel_.setZero();
GPoseVel_.block<3, 3>(0, kIndexErrorPos) = Eigen::Matrix3d::Identity();
GPoseVel_.block<3, 3>(3, kIndexErrorVel) = pose_.block<3, 3>(0, 0).transpose();
GPoseVel_.block<3, 3>(3, kIndexErrorOri) = Sophus::SO3d::hat( pose_.block<3, 3>(0, 0).transpose() *vel_ ) ;
GPoseVel_.block<3 ,3>(6, kIndexErrorOri) = Eigen::Matrix3d::Identity(); 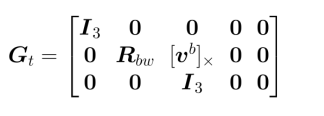
2.2、添加运动约束(伪观测)
void ErrorStateKalmanFilter::CorrectErrorEstimationPosiVel(
const Eigen::Matrix4d &T_nb, const Eigen::Vector3d &v_b, const Eigen::Vector3d &w_b,
Eigen::VectorXd &Y, Eigen::MatrixXd &G, Eigen::MatrixXd &K
) {
Eigen::Vector3d v_b_ = {v_b[0], 0, 0}; // measurment velocity (body 系) , 伪观测 (vy 、vz = 0)
Eigen::Vector3d dp = pose_.block<3, 1>(0, 3) - T_nb.block<3, 1>(0, 3);
Eigen::Vector3d dv = pose_.block<3, 3>(0, 0).transpose() *vel_ - v_b ; // delta v , v_x 来自轮速里程计
Eigen::Vector3d dtheta = Sophus::SO3d::vee(dR - Eigen::Matrix3d::Identity() );
// TODO: set measurement equation:
YPosiVel_.block<3, 1>(0, 0) = dp; // delta position
YPosiVel_.block<3, 1>(3, 0) = dv; // delta velocity
YPoseVel_.block<3, 1>(6, 0) = dtheta; // 失准角
Y = YPosiVel_;
// set measurement G
GPosiVel_.setZero();
GPosiVel_.block<3, 3>(0, kIndexErrorPos) = Eigen::Matrix3d::Identity();
GPosiVel_.block<3, 3>(3, kIndexErrorVel) = pose_.block<3, 3>(0, 0).transpose();
GPosiVel_.block<3, 3>(3, kIndexErrorOri) = Sophus::SO3d::hat( pose_.block<3, 3>(0, 0).transpose() *vel_ ) ;
G = GPosiVel_;
// set measurement C
CPosiVel_.setIdentity();
Eigen::MatrixXd C = CPosiVel_;
// TODO: set Kalman gain:
Eigen::MatrixXd R = RPosiVel_; // 观测噪声
K = P_ * G.transpose() * ( G * P_ * G.transpose( ) + C * R* C.transpose() ).inverse() ;
}仅仅是添加了一个运动约束,在侧向和天向速度为0;添加这两个约束进观测方程,因为没有任何观测,所以叫伪观测 ;
2.3、结果





评论(0)
您还未登录,请登录后发表或查看评论