

简介:介绍 万集716 单线激光 在EHub_tx1_tx2_E100载板,TX1核心模块环境(Ubuntu18.04)下测试ROS驱动,打开使用RVIZ 查看点云数据,本文的前提条件是你的TX1里已经安装了ROS版本:Melodic。关于测试硬件EHub_tx1_tx2_E100载板请查看:EdgeBox_EHub_tx1_tx2_E100 开发板评测_机器人虎哥的博客-CSDN博客
大家好,我是虎哥,前段时间,机器人内更换雷达方案,听说万集的716雷达数据很稳,有幸申请到了样品,有感于网上对于上手就可以简单玩起来的说明比较少,所以总结一下自己的简单测试经验,分享给大家。

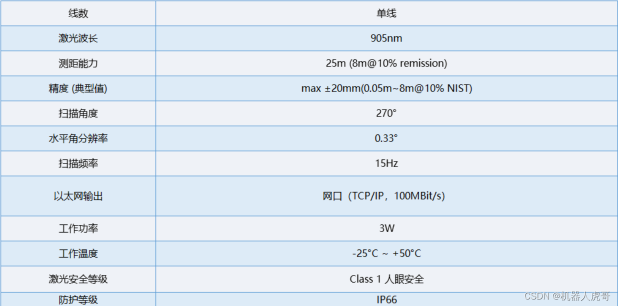
WLR-716 是北京万集科技股份有限公司自主研发的一款测量型迷你激光雷达。该激光雷达采用激光的 TOF 原理,结合高频激光脉冲发生技术、精密的光学扫描系统和精致的结构设计,使其可以在 270°/8 米(@10%反射率漫反射面)范围内快速精确实现扫描测距,其高度的稳定性及对环境光的超强抗干扰能力结合其小巧的体积,使其非常适用于搭载 RGV/AGV 及其它类别的工业车辆/机器人对周边轮廓扫描,同时也适用于物流/安防等领域。
目录
一、万集716 单线激光介绍
官网入口:首页

WLR-716 SLAM导航雷达,主要应用于SR(服务机器人)及AMR(自主移动机器人)的自然导航,雷达输出高质量点云,保证±2cm测距精度,可定制提供SLAM算法,大大促进SR及AMR项目的快速落地;雷达具有25m测距能力、测距精度高、数据够稳定,解决了SR及AMR在大空旷场景实现高精度定位的应用难题;雷达可抗强光、车规级生产工艺、多重回波设计,也为SR及AMR在室外高震动、雨雾天气等严酷环境的正常运行提供了保障。
1.1 主要特点
-
高达 500KHZ 的激光脉冲发生技术、精密的光学扫描系统、高灵敏度接收电路、高精度计时电路。
-
采用 1 级激光,保证人眼安全。
-
稳定性高、对环境光的抗干扰能力强。
-
采用多脉冲回波技术,能够滤除环境中漂浮物的干扰。
-
P66 防护等级。
-
270°扫描角度,0.33°角度分辨率。
-
测距精度
-
(10%漫反射面)0.05m-8m ±25mm 误差。
-
(白板测量)0.05m-25m ±25mm 误差。
-
-
体积小、功耗低、外观时尚。
-
适合不同的安装方法。
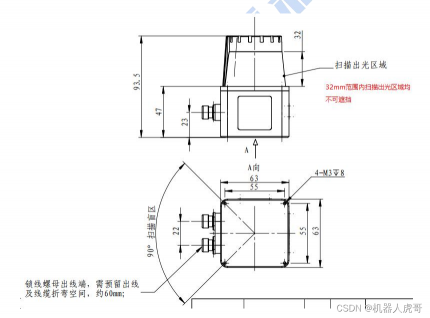
1.2 安装尺寸
1.3 扫描范围

WLR-716 可以提供 270°范围的点云数据,180°的位置处于传感器的正前方,通过顶部的菱形标志进行标识。在俯视的视角下,角度随着顺时针方向递增(该方向为默认出厂状态,角度递增方向可根据具体需要在上位机中进行设置)。WLR-716 存在一段 90°的盲区,位于 45°-0°-315°的区间。
1.4 官网资源获取
资源获取入口:万集激光雷达

二、WIN端测试配置
使用万集716/718系列的激光雷达需要先使用万集的上位机进行一些参数配置,主要为ip和端口号。
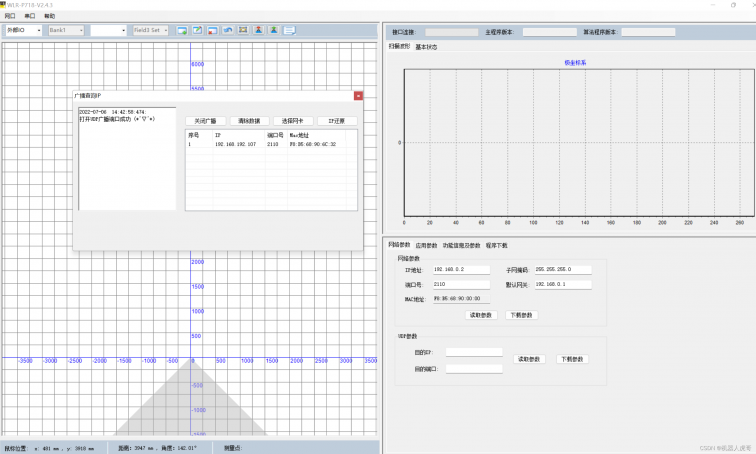
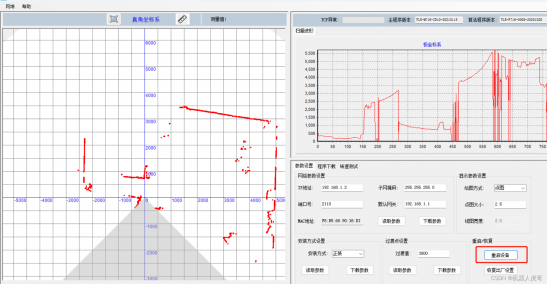
将激光雷达上电通过网线连接在个人电脑上,打开上位机之后带点击左上角的网口---广播,点击开始广播,上位机会自动搜索激光雷达的ip,接着需要将个人电脑的ip修改为激光雷达同一网段,之后点击上位机左上角网口---激光器ip,填写激光雷达的真实ip和端口,接着点击网口---连接即可连接上激光雷达。 在连接上激光雷达之后可以在界面看到激光雷达的点云数据以及一些参数配置。为了能够在仙工智能控制器上使用,需要将激光雷达ip修改为192网段,修改完之后点击下载参数即可。
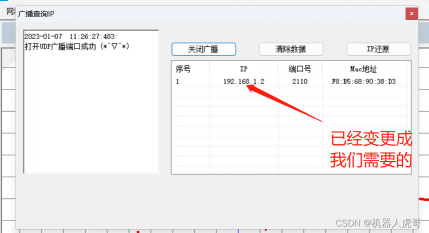
2.1 打开软件,广播扫描:



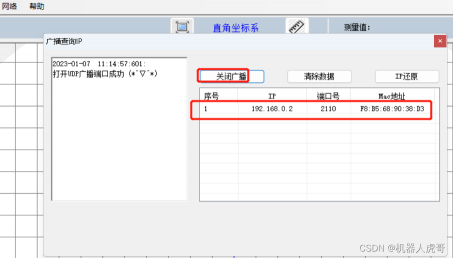
这样就扫描出来了雷达的IP。根据广播得到的 IP 地址和端口号设置 PC 的网络参数与雷达为同一个网段。
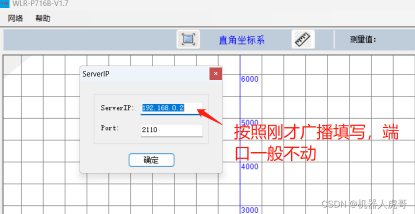
2.2 链接雷达
根据广播得到的 IP 地址和端口号设置 PC 的网络参数与雷达为同一个网段。

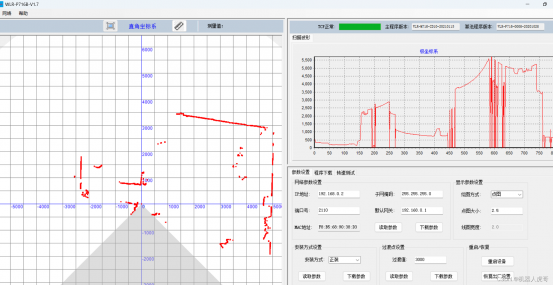 链接后既可以看到点云数据了。
链接后既可以看到点云数据了。
2.3 根据需要修改配置,一般改最多的就是IP信息
读取信息
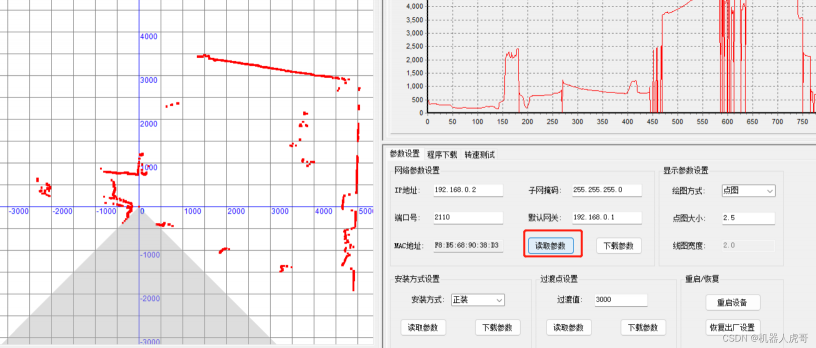
修改信息

下载参数:

 重启,生效修改
重启,生效修改
 重启后,就会断开链接。
重启后,就会断开链接。
三、ROS下查看点云
上面WIN端,我们修改了IP信息,这里将雷达网口和测试主板链接到一起。ROS下的驱动官网既可以下载到。
3.1 建立工作空间
-
mkdir -p ~/WLR_ws/src
-
cd ~/WLR_ws/
-
catkin_make
-
source devel/setup.bash
3.2 拷贝代码
-
cd ~/WLR_ws/src
-
#将官网地址的代码包放置到这个目录解压

3.3 编译源码包
-
cd ~/WLR_ws
-
catkin_make --pkg wj_716_lidar

编译完成。
3.4 将板子IP修改到和雷达同一个网段
我是将雷达直接连到板子网口的,所以对应网口IP我需要设置一个固定IP。雷达IP,见2.3.

板子IP:
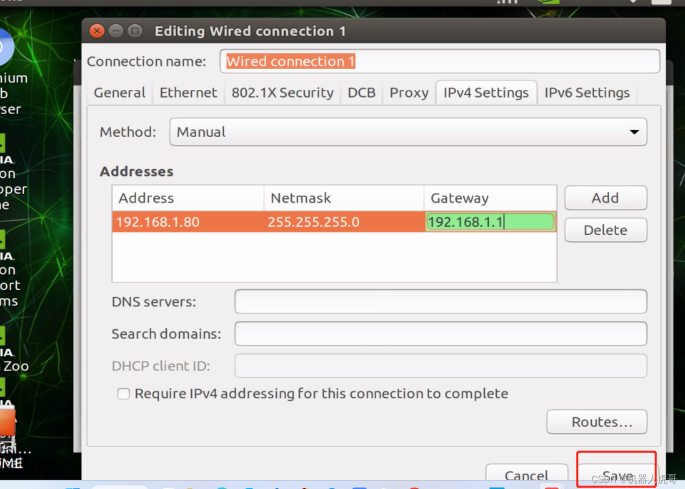
修改完毕后,重新链接网口:
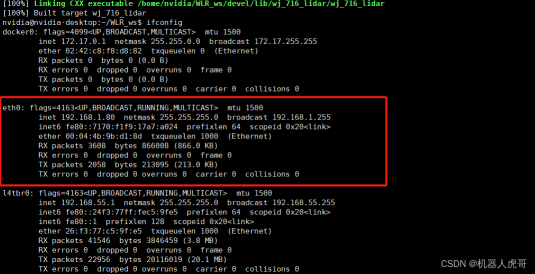
可以ping通雷达。

雷达和板子已经在同一个网段了。
3.5 修改ROS 驱动启动脚本中对应的信息
刚才我们根据需要已经修改了IP,接下来我们测试,需要使用脚本启动,需要修改脚本的对应IP信息。
cd ~/WLR_ws/src/wj_716_lidar/launch脚本原始内容是:
-
<?xml version="1.0"?>
-
<!-- start and stop angle is given in [rad] -->
-
<!--
-
default min_angle is -135 degree.
-
default max_angle is +135 degree.
-
-
Check IP-address, if you scanner is not found after roslaunch.
-
-->
-
-
<launch>
-
<node name="wj_716_lidar_01" pkg="wj_716_lidar" type="wj_716_lidar" respawn="false" output="screen">
-
<param name="hostname" type="string" value="192.168.0.2" />
-
<param name="port" type="string" value="2110" />
-
<!-- -135° -->
-
<param name="min_ang" type="double" value="-2.35619449" />
-
<!-- 135° -->
-
<param name="max_ang" type="double" value="2.35619449" />
-
<param name="frame_id" type="str" value="laser" />
-
<param name="range_min" type="double" value="0.05" />
-
<param name="range_max" type="double" value="25.0" />
-
-
</node>
-
</launch>

修改其中的IP至,雷达实际IP。其它可以先不动。
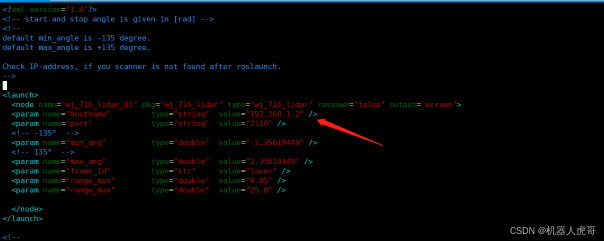
保存退出后我们就可以开始测试了。
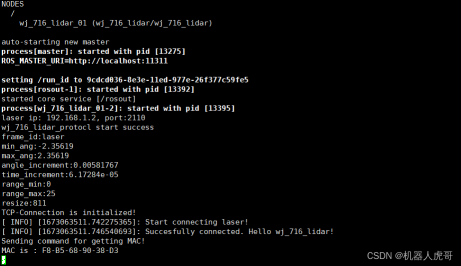
3.6 启动驱动
-
cd ~/WLR_ws
-
source devel/setup.bash
-
#启动驱动
-
roslaunch wj_716_lidar wj_716_lidar_01.launch
新启动一个终端,我们可以初步看看驱动的一些节点信息:
-
rosnode list
-
--------------------------------------------------------------------------------
-
/rosout
-
/wj_716_lidar_01
-
-
rosnode info /wj_716_lidar_01
-
--------------------------------------------------------------------------------
-
Node [/wj_716_lidar_01]
-
Publications:
-
* /rosout [rosgraph_msgs/Log]
-
* /scan [sensor_msgs/LaserScan]
-
* /wj_716_lidar_01/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
-
* /wj_716_lidar_01/parameter_updates [dynamic_reconfigure/Config]
-
-
Subscriptions: None
-
-
Services:
-
* /wj_716_lidar_01/get_loggers
-
* /wj_716_lidar_01/set_logger_level
-
* /wj_716_lidar_01/set_parameters
-
-
-
contacting node http://nvidia-desktop:39331/ ...
-
Pid: 13395
-
Connections:
-
* topic: /rosout
-
* to: /rosout
-
* direction: outbound (54777 - 127.0.0.1:47812) [14]
-
* transport: TCPROS
-
-
rostopic echo /scan
-
--------------------------------------------------------------------------------
-
header:
-
seq: 6184
-
stamp:
-
secs: 1673063922
-
nsecs: 632500432
-
frame_id: "laser"
-
angle_min: -2.35619449615
-
angle_max: 2.35619449615
-
angle_increment: 0.00581766664982
-
time_increment: 6.17283949396e-05
-
scan_time: 0.0
-
range_min: 0.0
-
range_max: 25.0
-
ranges: [0.5690000057220459, 0.574999988079071,。。。。。。。。】
4.6 启动RVIZ查看点云
保持驱动是启动的情况下。我们使用nomachine链接到桌面,启动RVIZ。
rosrun rviz rviz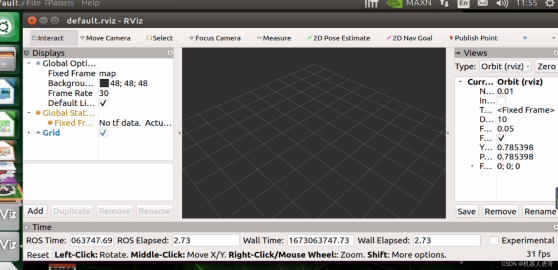
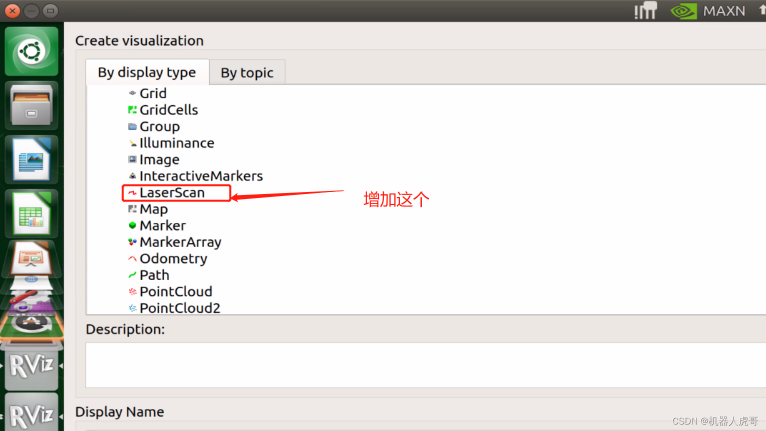
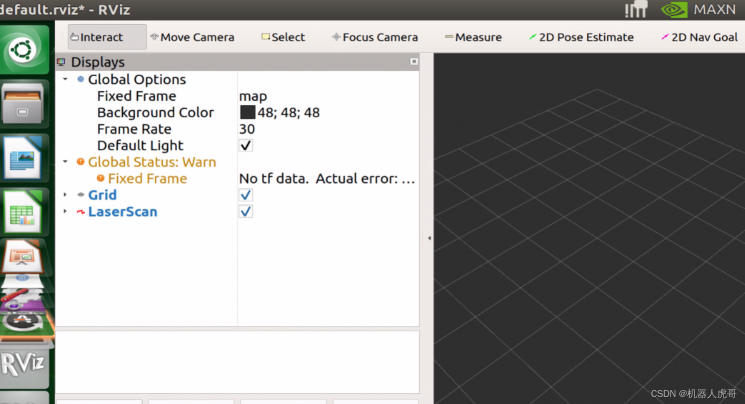
刚添加完毕,还不会有数据点云,需要做一下话题配置。
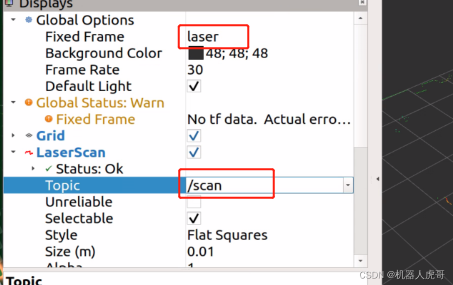
这样就可以看到激光数据了。
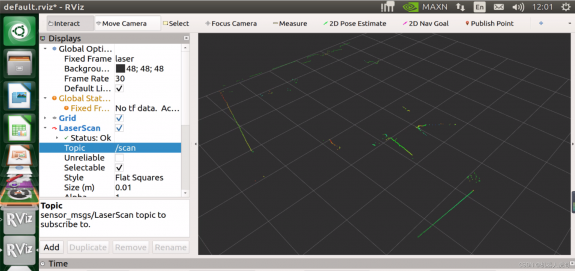
可以将这个配置保存,以便后期直接查看。
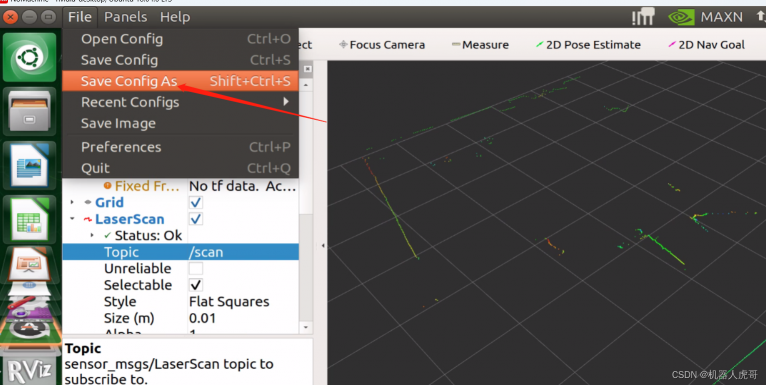
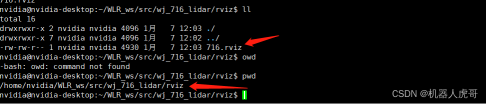 后面如果要查看,只需要直接使用RVIZ打开这个文件即可。
后面如果要查看,只需要直接使用RVIZ打开这个文件即可。
纠错,疑问,交流: 911946883@qq.com



评论(0)
您还未登录,请登录后发表或查看评论