

进入之前需要掌握基础的矩阵理论
机械臂坐标系系统
机械臂通常使用多种坐标系来描述其运动和控制。这些坐标系可以帮助机械臂执行复杂的任务,包括定位和姿态控制。以下是一些常见的机械臂坐标系系统:
1. 基底坐标系(Base Coordinate System):基底坐标系是机械臂的固定部分的坐标系,通常是整个机械臂的参考点; 机械臂的所有运动都是相对于基底坐标系进行的。
2. 关节坐标系(Joint Coordinate System):关节坐标系是机械臂的每个关节的坐标系; 机械臂的关节角度通常相对于关节坐标系来描述,这有助于控制每个关节的运动。
3. 工具坐标系(Tool Coordinate System):工具坐标系是机械臂末端执行器(例如夹具、传感器)的坐标系; 通过工具坐标系,机械臂可以精确控制末端执行器的位置和姿态。
4. 世界坐标系(World Coordinate System):世界坐标系通常是一个全局坐标系,用于描述机械臂在其操作环境中的位置和姿态; 机械臂的基底坐标系通常与世界坐标系相关联,以帮助机械臂在环境中进行导航和定位。
5. 工件坐标系(Workpiece coordinate system):工件坐标系是工件相对与世界坐标系或其他坐标系的位置,用于执行任务操作的认为设定的坐标系。
这些坐标系之间存在变换关系,允许机械臂在不同坐标系中进行运动和控制。例如,机械臂可能需要将关节空间中的角度转换为末端执行器的位置和姿态,这涉及到基底坐标系、关节坐标系和工具坐标系之间的变换。
如下图所示,一般世界坐标系与基坐标系建立在一起。

机械臂建模方法:DH模型法与改进DH模型法
机械臂建模是机器人学中的一个重要任务,它涉及到描述机械臂的几何、运动学和动力学性质。DH(Dennavit-Hartenberg)模型是一种常用的方法,用于建模机械臂的运动学。
### DH(Dennavit-Hartenberg)模型法
DH模型法是一种用于描述机械臂运动学的经典方法,它基于一组参数和约定来表示机械臂的连杆、关节和坐标系之间的几何关系。DH参数通常包括以下四个参数:
1. **连杆长度(a)**:描述相邻两个关节之间的距离或连杆的长度。
2. **连杆旋转角度(α)**:描述连杆的旋转角度,通常是绕z轴旋转。
3. **关节长度(d)**:描述相邻两个连杆之间的距离,也称为关节偏移。
4. **关节旋转角度(θ)**:描述关节的旋转角度,通常是绕z轴旋转。
使用这些参数,可以创建一个DH变换矩阵,它描述了一个关节坐标系如何相对于前一个关节坐标系进行变换。通过组合这些变换矩阵,可以计算出末端执行器的位置和姿态。
如下图所示:
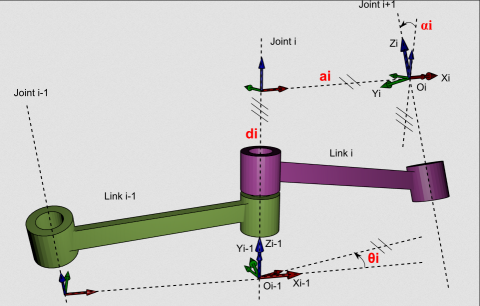
变化流程:
- 绕$$ z_{i-1} $$旋转角度$$\theta_{i}$$,使得前一关节坐标系的$$x_{i-1}$$和后一关节坐标系的$$x_{i}$$平行
- 沿$$z_{i-1}$$轴平移$$d_{i}$$,使得前一关节坐标系的$$x_{i-1}$$和后一关节坐标系的$$x_{i}$$共线
- 沿$$x_{i}$$轴平移$$a_{i}$$,使得前一关节坐标系的$$x_{i-1}$$和后一关节坐标系的$$x_{i}$$原点重合
- 将$$z_{i-1}$$轴绕$$x_{i}$$旋转$$\alpha_{i}$$,使得前一关节坐标系的$$x_{i-1}$$和后一关节坐标系的$$x_{i}$$共线
下式完整展示整个机械臂建模的过程:
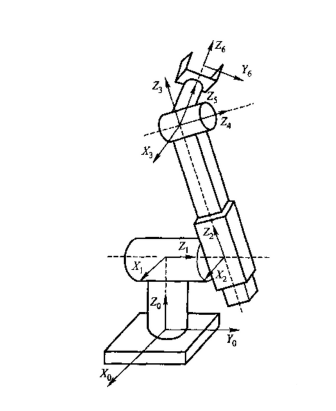
| i | $$a_{i}$$ | $$\alpha_{i}$$ | $$d_{i}$$ | $$\theta_{i}$$ |
| 1 | 0 | -90 | $$d_{1}$$ | $$\theta_{1}$$ |
| 2 | 0 | 90 | $$d_{2}$$ | $$\theta_{2}$$ |
| 3 | 0 | 0 | $$d_{3}$$ | 0 |
| 4 | 0 | -90 | 0 | $$\theta_{4}$$ |
| 5 | 0 | 90 | 0 | $$\theta_{5}$$ |
| 6 | 0 | 0 | $$d_{6}$$ | $$\theta_{6}$$ |
### 改进DH模型法
虽然DH模型法是一种常用的机械臂建模方法,但它存在一些限制,例如在描述某些类型的机械臂时可能会出现奇异性或不适用。为了解决这些问题,研究人员提出了改进的DH模型方法,这些方法可能包括以下内容:
1. **Modified DH(MDH)模型**:MDH模型使用不同的约定和参数来描述机械臂的运动学,以解决DH模型的一些问题。
2. **增加参数**:改进的模型可能引入额外的参数来更好地描述复杂的机械臂结构,例如并联机械臂。
3. **使用其他坐标系**:改进的模型可以使用其他坐标系和变换方法来更准确地建模机械臂。
4. **奇异性分析**:一些改进的模型可能包括奇异性分析,以识别机械臂运动学中的奇异点。
改进的DH模型法旨在提高对各种机械臂结构的建模能力和准确性,使机械臂的运动学建模更加灵活和适用于不同的应用场景。选择建模方法通常取决于机械臂的具体结构和任务要求。
相对于DH模型法的主要区别在于:
先进行DH中的3,4两步,在进行1,2。同样使用上述例子,改进DH方法的模型参数如下:
| i | $$a_{i}$$ | $$\alpha_{i}$$ | $$d_{i}$$ | $$\theta_{i}$$ |
| 1 | 0 | 0 | 0 | $$\theta_{1}$$ |
| 2 | 0 | -90 | $$d_{2}$$ | $$\theta_{2}$$ |
| 3 | 0 | -90 | $$d_{3}$$ | 90 |
| 4 | 0 | 0 | 0 | $$\theta_{4}$$ |
| 5 | 0 | -90 | 0 | $$\theta_{5}$$ |
| 6 | 0 | 90 | 0 | $$\theta_{6}$$ |
| 7 | 0 | 0 | $$d_{6}$$ | 0 |


评论(0)
您还未登录,请登录后发表或查看评论