

1.考虑道路倾角及曲率影响
道路倾角与曲率对无人驾驶车辆的操纵稳定性有着重要影响
直接关系到车辆动力学模型的准确程度
结合《车辆运动控制(6)考虑侧倾约束》得到的综合考虑横摆、侧滑和侧候约束的车辆动力学模型
建立考虑道路倾角及曲率影响的车辆动力学模型,如图所示: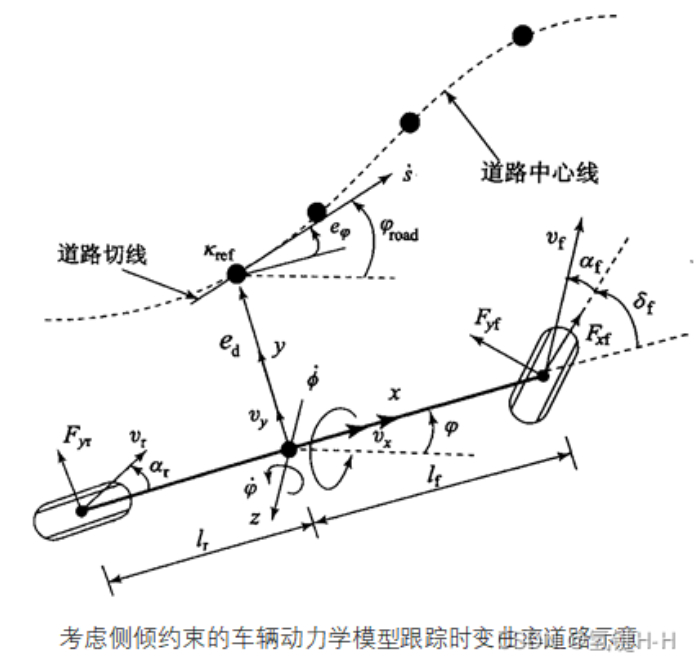
考虑侧倾约束的车辆动力学模型跟踪时变曲率参考道路的跟踪误差方程可由式(11)得到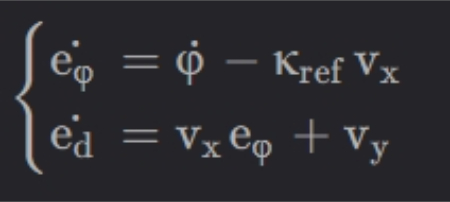
考虑存在道路倾角中的情况如图: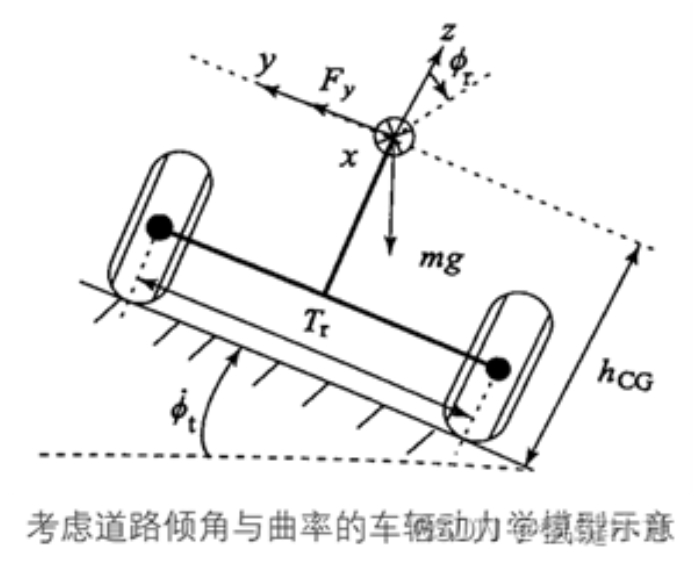
车辆质心处受到的合力在y轴上的分力可表示为:

此时,式(36) 和 式(38) 可改写为: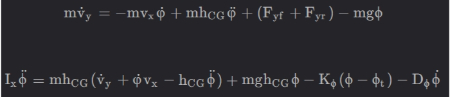
将 式(22) 和 式(23) 代人 式(41)、式(38) 和 式(42) 可以得到: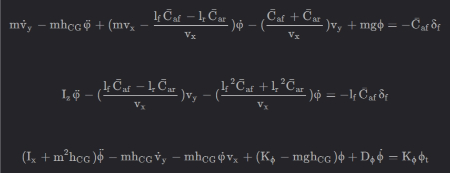
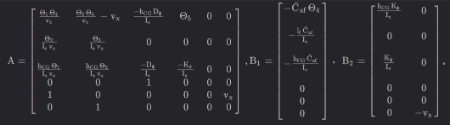
2. 综合等效约束车辆动力学模型
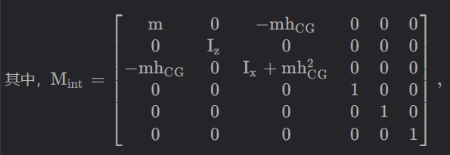

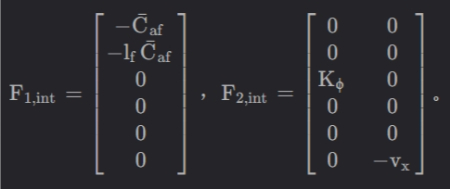
通过对 式(46) 进行变形,可以得到考虑道路倾角与曲率的综合等效约束车辆动力学模型: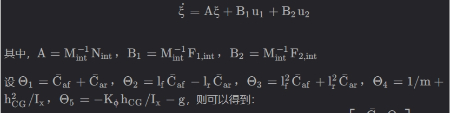



评论(0)
您还未登录,请登录后发表或查看评论