

二连杆机器人的动力学
参考资料
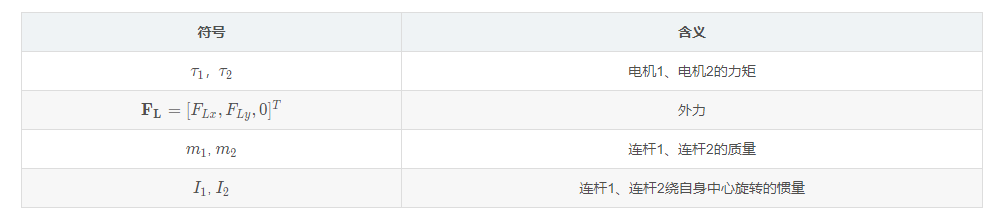
二连杆机器人
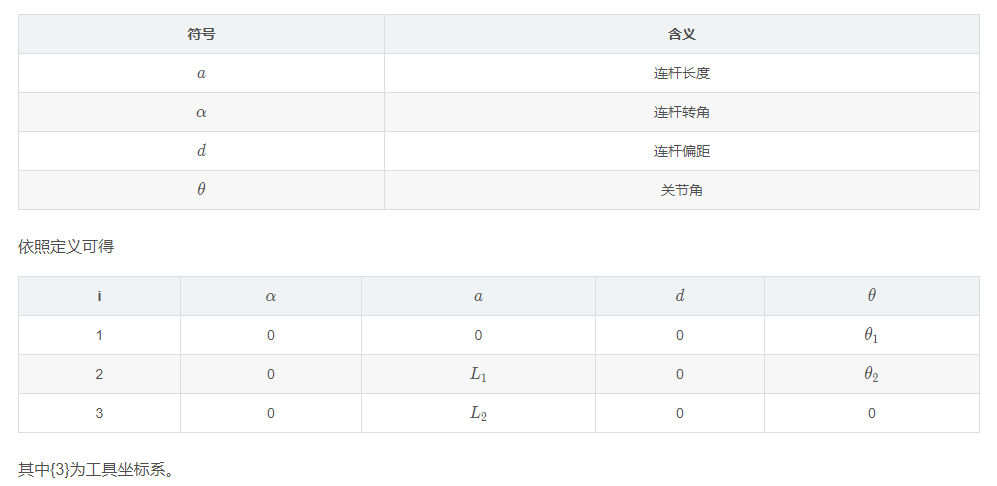
DH参数
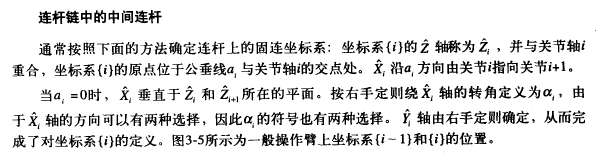
对连杆附加坐标系的规定
在连杆坐标系中对连杆参数的归纳
运动学
速度雅可比
Matlab验证代码
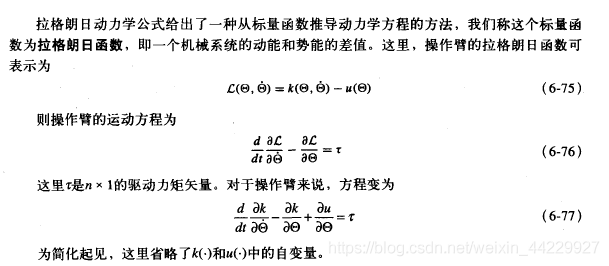
拉格朗日法动力学建模
理论
分析
实现重力配平
牛顿欧拉法动力学建模
参数辨识
线性化
辨识轨迹的设计
simscape仿真
参考
参考资料
「ロボット工学入門」高田洋吾著
Matlab 2018b
二连杆机器人
模型如下:
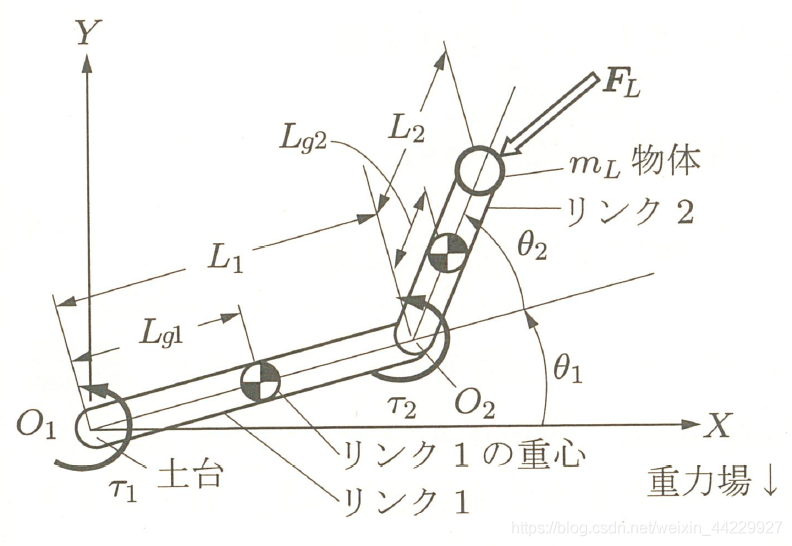
忽略摩擦力,空气阻力和轴承的粘滞摩擦力。
DH参数
对连杆附加坐标系的规定

在连杆坐标系中对连杆参数的归纳

运动学
见Matlab验证代码
速度雅可比
设末端坐标为( x p , y p ) 
Matlab验证代码
%数值计算
clear
clc
syms g;
syms L1 L2;
syms Lg1 Lg2;
syms I1 I2;
syms m1 m2 mL;
syms cta1 cta2;
syms d_cta1 d_cta2;
syms x1 y1;
syms x2 y2;
syms xL yL;
syms d_x1 d_y1;
syms d_x2 d_y2;
syms d_xL d_yL;
syms Fx Fy
%cta1=deg2rad(90); cta2=deg2rad(0);
%L1=1; L2=1;
dh_table=...
[0, 0, 0, cta1
0, L1, 0, cta2
0, L2, 0, 0];
alpha=dh_table(:,1);
a=dh_table(:,2);
d=dh_table(:,3);
theta=dh_table(:,4);
T01=T_para(theta(1),d(1),a(1),alpha(1));
T12=T_para(theta(2),d(2),a(2),alpha(2));
T23=T_para(theta(3),d(3),a(3),alpha(3));
T02=T01*T12;
T03=T02*T23;
%正运动学
T_1=T01*[Lg1;0;0;1];
T_2=T02*[Lg2;0;0;1];
T_3=T03*[0;0;0;1];
x1=simplify(T_1(1));
y1=simplify(T_1(2));
%复合函数如何求导数(matlab复合函数求导无力)
d_x1=-Lg1*d_cta1*sin(cta1);
d_y1=Lg1*d_cta1*cos(cta1);
x2=simplify(T_2(1));
y2=simplify(T_2(2));
d_x2=-L1*d_cta1*sin(cta1)-Lg2*(d_cta1+d_cta2)*sin(cta1+cta2);
d_y2=L1*d_cta1*cos(cta1)+Lg2*(d_cta1+d_cta2)*cos(cta1+cta2);
xL=simplify(T_3(1));
yL=simplify(T_3(2));
d_xL=-L1*d_cta1*sin(cta1)-L2*(d_cta1+d_cta2)*sin(cta1+cta2);
d_yL=L1*d_cta1*cos(cta1)+L2*(d_cta1+d_cta2)*cos(cta1+cta2);
%速度雅可比
J11=-L1*sin(cta1)-L2*sin(cta1+cta2);
J12=-L2*sin(cta1+cta2);
J21=L1*cos(cta1)+L2*cos(cta1+cta2);
J22=L2*cos(cta1+cta2);
Jacobin=[J11 J12;J21 J22;0 0];
%动能
k1=0.5*m1*[d_x1;d_y1;0].'*[d_x1;d_y1;0]+0.5*[0;0;d_cta1].'*I1*[0;0;d_cta1];
k2=0.5*m2*[d_x2;d_y2;0].'*[d_x2;d_y2;0]+0.5*[0;0;d_cta1+d_cta2].'*I1*[0;0;d_cta1+d_cta2];%注意角速度的叠加
kL=0.5*mL*[d_xL;d_yL;0].'*[d_xL;d_yL;0];
u1=-m1*[0;-g;0].'*[x1;y1;0]+m1*[0;g;0].'*[0;Lg1;0];
u2=-m2*[0;-g;0].'*[x2;y2;0]+m2*[0;g;0].'*[0;Lg2+L1;0];
uL=-mL*[0;-g;0].'*[xL;yL;0]+mL*[0;g;0].'*[0;L2+L1;0];
k=k1+k2+kL;
u=u1+u2+uL;
L=simplify(k-u);
%虚功原理
FL=[Fx;Fy;0];%相对于基座标系
tau=Jacobin.'*FL;
tau_L1=tau(1);
tau_l2=tau(2);
%只考虑重力进行重力配平
tau_1=simplify(diff(u,cta1));
tau_1=collect(tau_1,cos(cta1));
tau_1=collect(tau_1,cos(cta1+cta2))
tau_2=simplify(diff(u,cta2))
%齐次变换矩阵
function T = T_para(theta,d,a,alpha)
T=[ cos(theta),-sin(theta),0,a
sin(theta)*cos(alpha),cos(theta)*cos(alpha),-sin(alpha),-sin(alpha)*d
sin(theta)*sin(alpha),cos(theta)*sin(alpha),cos(alpha),cos(alpha)*d
0,0,0,1];
end
拉格朗日法动力学建模
理论
动能


分析
设如下图所示的坐标系统
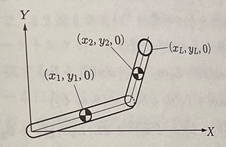
图中的x n
和y n
均是相对于{ 0 }坐标系而言的。
在实际操作过程中,matlab在对符号方程存在较弱的求导能力,因此考虑之后使用Mathematica,
在这里仅对势能进行考虑。 或者在考虑动力学问题时使用牛顿欧拉法进行建模。
实现重力配平
不考虑动能及摩擦力,只考虑物体的势能。
根据仿真代码可得
牛顿欧拉法动力学建模
参数辨识
线性化
辨识轨迹的设计
simscape仿真
参考
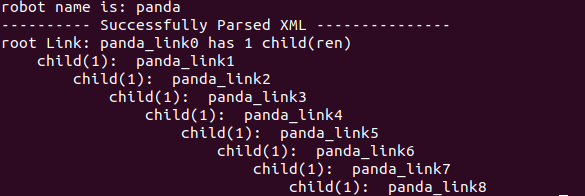
URDF Import
How do I import XACRO files as Rigid Body Trees in Robotics System Toolbox? 这种方法对于ROS-pkg里的无效,简单点:
rosrun xacro xacro --inorder -o "$MYROBOT_NAME".urdf "$MYROBOT_NAME".urdf.xacro
然后check一下,是正确的:


评论(1)
您还未登录,请登录后发表或查看评论