

x
- 背景介绍
上回书我们尝试了去复现UR机器人拖动示教的原理。经过一番尝试,阻抗控制/导纳控制可能是UR采取的策略。
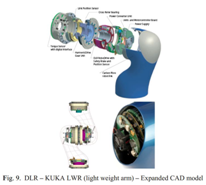
目前市面上,类似UR的协作机器人平台还有DLR-KUKA的LWR和iiwa等。以这两款机器人为例,它跟UR在结构上有一点重要的不同。

UR在每个关节上采取的是双编码器的方式,分别测量电机角度和连杆角度。而LWR等在每个关节上还加入了一个单轴力矩传感器(一般位于减速器输出端与末端连杆间),用于测量每个关节的输出力矩。从文献及实际体验看,LWR在牵引拖动时表现更好,用户施加更小的力就可以牵着机器人按其意图运动。
只是多了一个小小的关节力矩传感器,为什么能提升牵引示教的效果呢?
- 理论分析
牵引示教时,机器人每个关节的输出力矩若能刚好抵消其重力,惯性力及粘滞力,那此时机器人处于力平衡的状态,我们这个时候可以很容易地推动它(自行想象宇航员在太空中上推动物体的体验)。这是牵引示教的核心,一般也称为零力模式或透明模式。从控制的角度,要想实现理想的牵引示教,就是要精确地控制关节输出力矩。我们所谓的牵引示教效果好,本质上是机器人关节力输出矩控制地越好
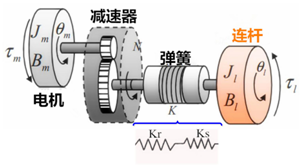
根据上回的分析,LWR机器人的每个关节可由下图描述。这里有点不同的是,弹簧是由两部分弹性元件串联而成的:谐波减速器柔轮的柔性与力矩传感器的柔性,它的刚度系数相当于柔轮的刚度Kr和关节力矩传感器刚度Ks的串联。
根据胡克定律,我们有
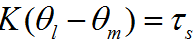
其中tau_s是关节力矩,可由力矩传感器测量获得;经过此步,可标定出弹簧的刚度系数K。
再由牛顿第三定律(简单起见,减速比为1),我们就可以获得一组完整地描述关节的动力学方程,
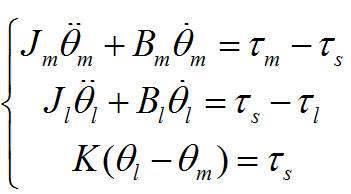
通过合适的变量代换,我们可以获得一个关于tau_s(tau_s就是我们的控制目标)的二阶微分方程。当我们能对控制对象建立一个解析的模型,剩下的控制律可以参照很多现有的方法(基础是李雅普诺夫方程)。
比如我们在控制机器人位置时,往往也是得到一个关于角度的二阶微分方程;我们可以与其类比,找到一些适用的控制律。这部分有一定的理论深度,在此略过。
而UR的双编码器是无法提供上述的动力学方程,我们没办法对控制对象建立合适的模式。此情此景下,要达到控制关节力矩的目的,有两种较为合适的方法:单纯PID控制(上文方案一)和导纳控制(上文方案二)。
另外,关节力矩传感器的信号精度(+/-0.2Nm)比位置传感器的小很多,这会严重损害单纯的PID反馈控制效果
- 总结
通过两篇文章的讨论,我们再一次强调了建模在控制中的作用。要实现更好的关节力矩控制效果,建模是必不可少的。




评论(1)
您还未登录,请登录后发表或查看评论