

前言
仿真摸索了一个月了,一直没有什么实质性进展。
用solidworks导出来的urdf模型不是在gazebo里面乱跳,就是自己反转,抖动,丢失零件。
最后发现solidworks导出urdf的插件本身有问题,我的模型里面的虚拟零件本来没有实体的,结果质量超过了1千克,比整个机架都重。所以最后先是通过solidworks的插件导出urdf文件,然后再重新手动调整。
下图是各种翻车图片。
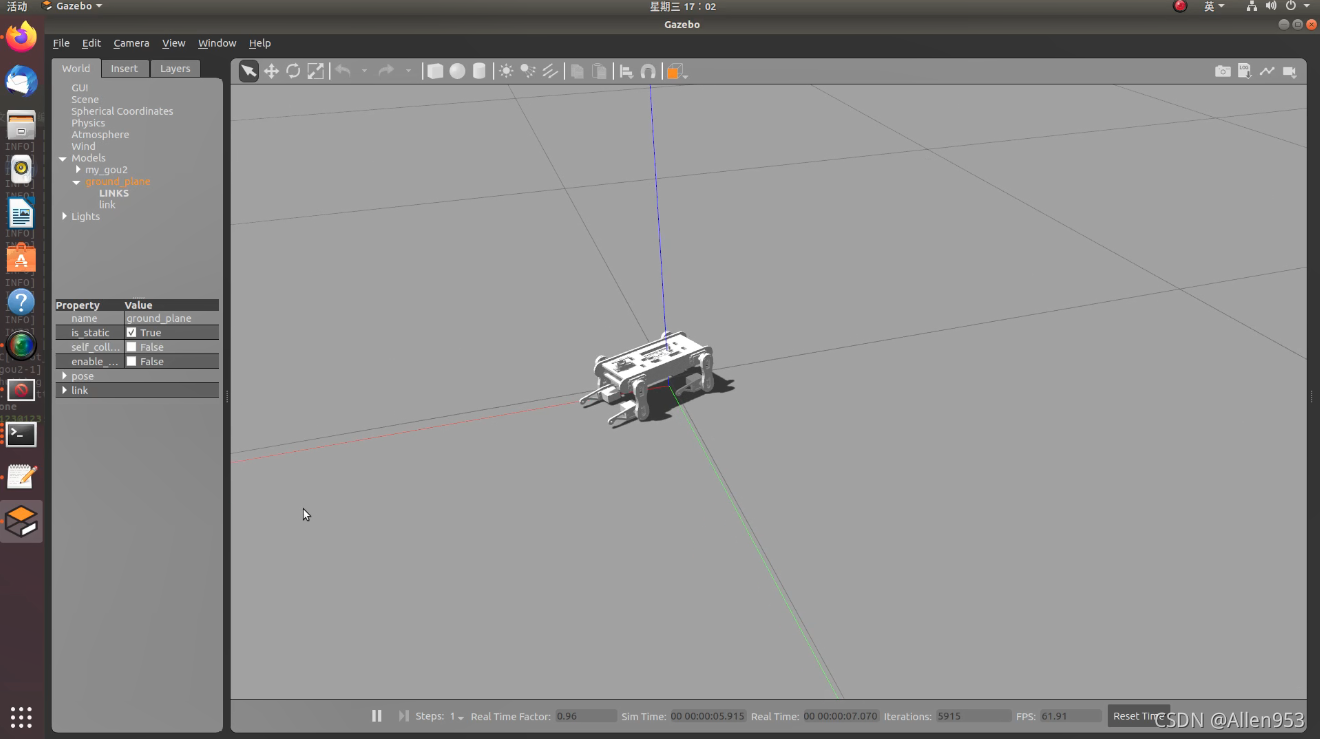
最后的最后,历尽千辛,终于整个模型安安静静的卧在地上了。
如下图:
终于可以开干。
1.项目地址
gitee地址:https://gitee.com/li9535/gazebo_simulation_ros_package/tree/master/
2.运行效果
白泽四足机器人gazebo仿真例程1




评论(0)
您还未登录,请登录后发表或查看评论