

1.smimport载入机器人模型
首先,我们需要载入机器人模型,还是用从solidworks里面导出来的urdf模型即可。
然后将我们的urdf文件和meshs文件夹都添加到路径。
接着,我们用smimport命令载入机器人模型。
smimport("gou2/urdf/gou2.urdf")然后等着它生成物理网格。
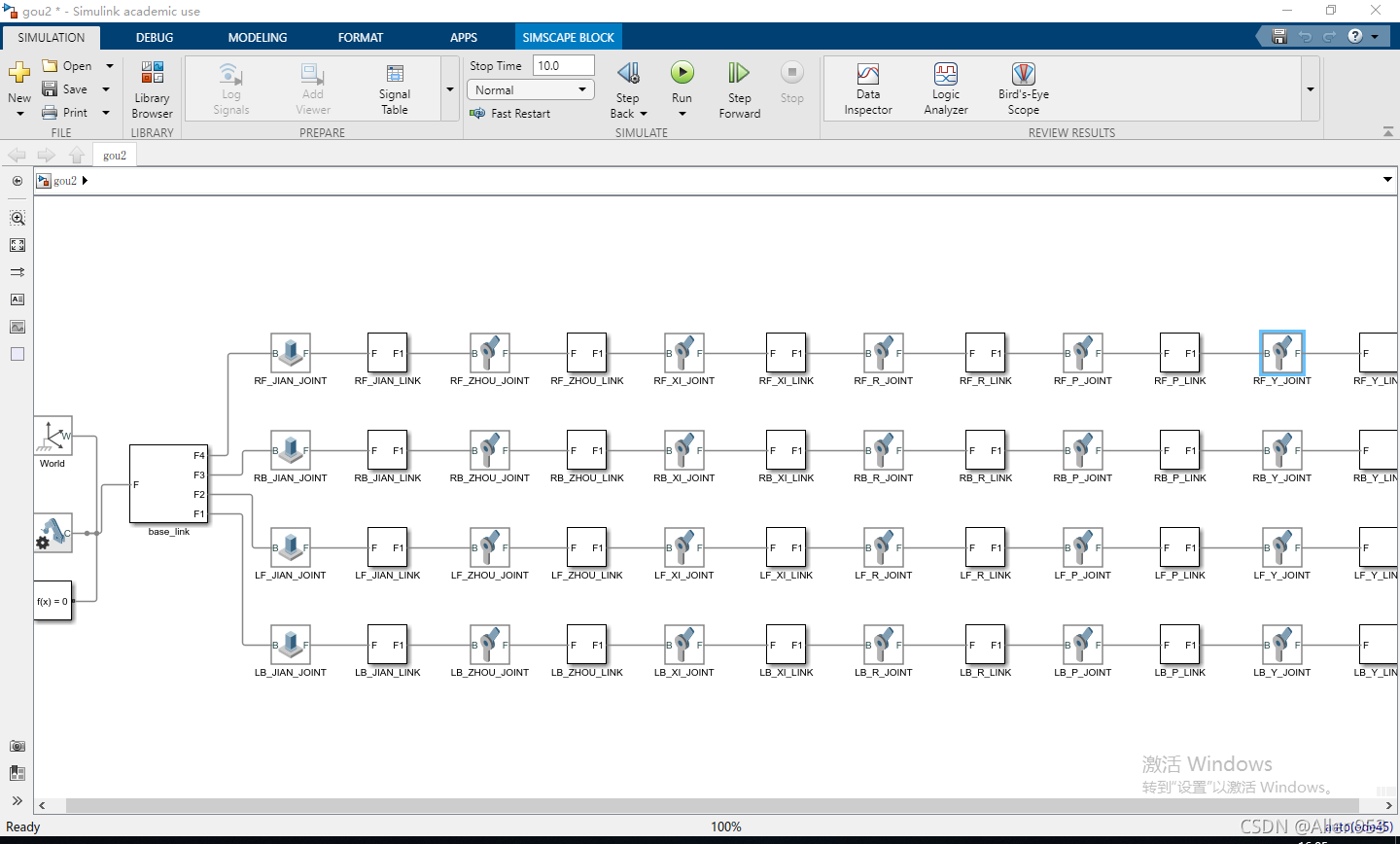
生成的物理网格包含了每个link和每个joint的详细信息。还有world坐标系。
接着,我们点击上面绿色的运行按钮。
就可以运行我们的仿真了,由于什么控制器都没有添加,仿真环境中每个joint都会随着设置的重力,惯性矩阵,阻尼等参数由重力作用进行运动。
效果如下:
matlab用simulink工具载入机器人模型
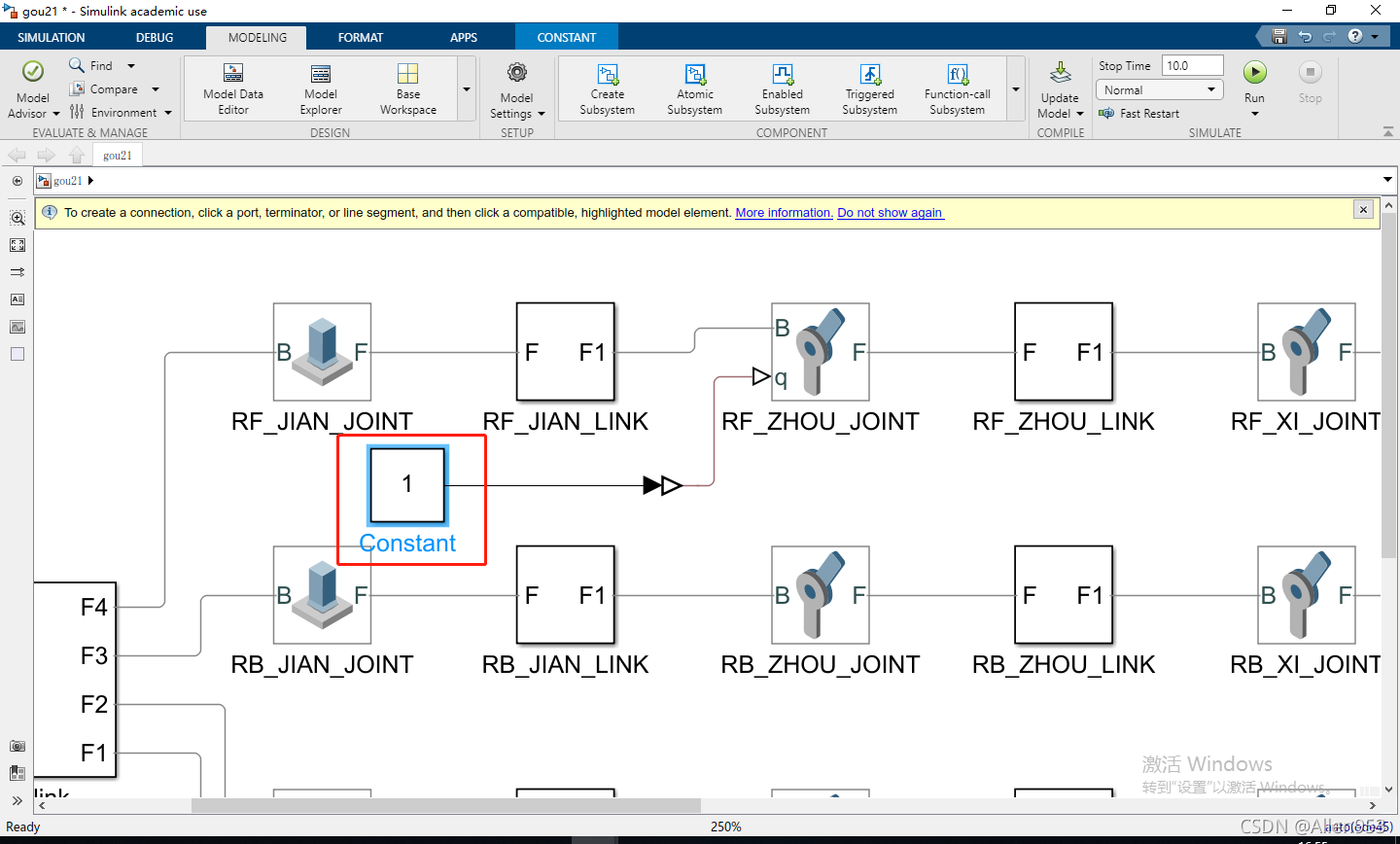
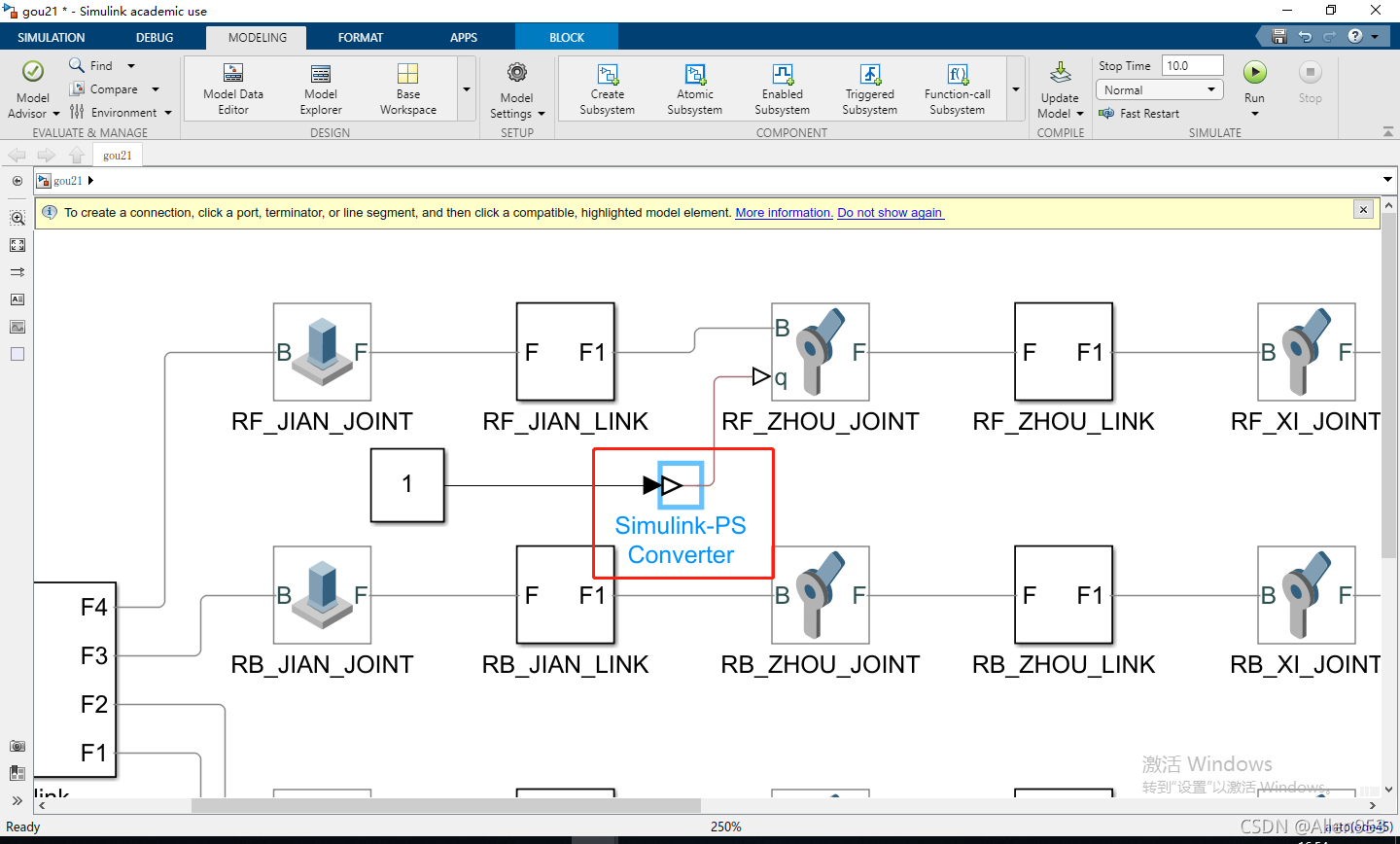
2.添加关节控制器




评论(0)
您还未登录,请登录后发表或查看评论