

背景知识
导航坐标系:东-北-天
载体坐标系:右-前-上
一、旋转矩阵
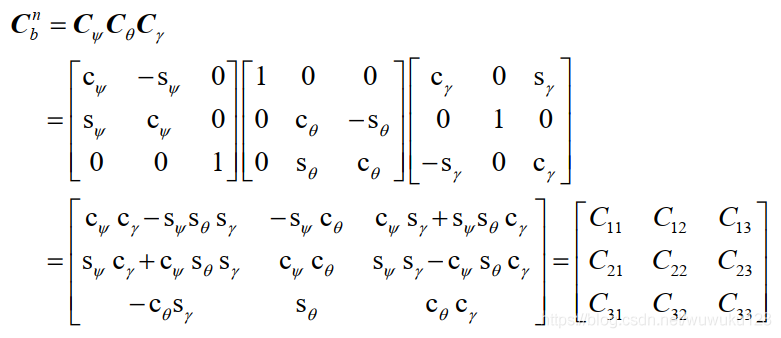
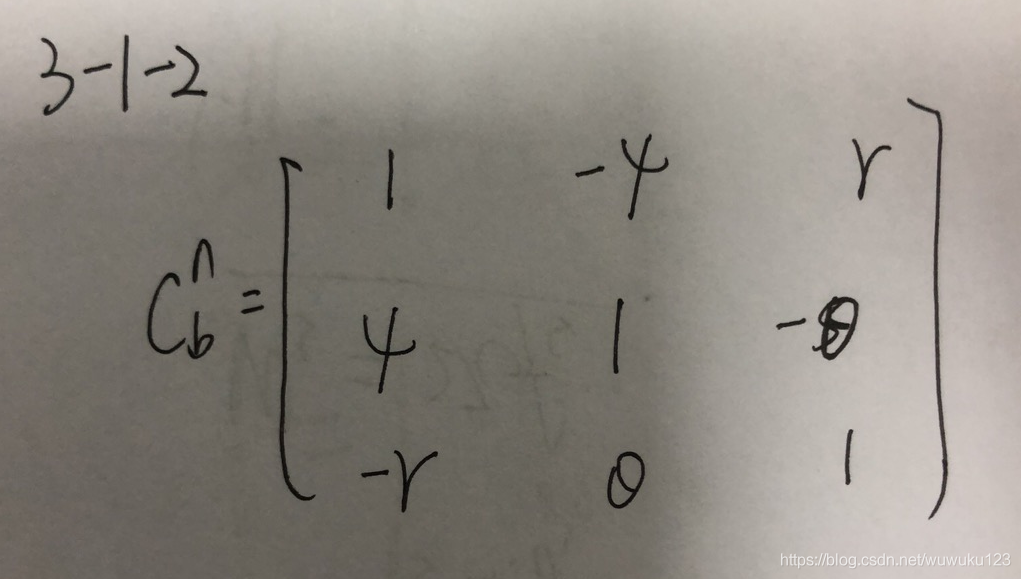
1、欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角),其中航向角北偏西为正,范围【-pi pi】
假设旋转角度为小角度:
cos(ψ)=1、cos(θ)=1、cos(γ)=1;
sin(ψ)=ψ、sin(θ)=θ、sin(γ)=γ; 并且小量与小量相乘为0,既:ψ*θ=0;ψ*γ=0;θ*γ=0;
对上面方向余弦矩阵小角度处理后,得到如下:
2、欧拉角定义:3-2-1旋转,(航向角-滚转角-俯仰角);
θ为俯仰角;γ为横滚角;ψ为航向角;
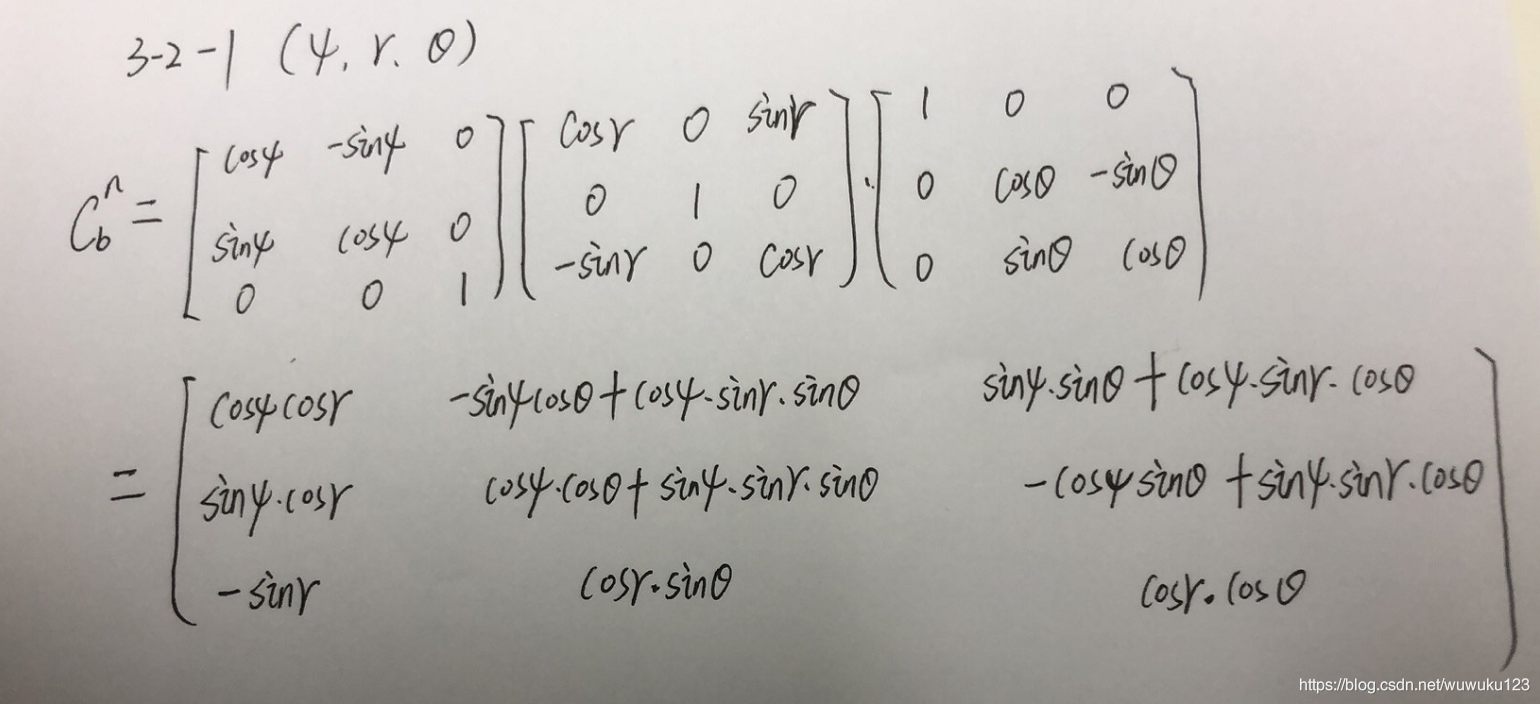
对上面方向余弦矩阵小角度处理后,得到如下:
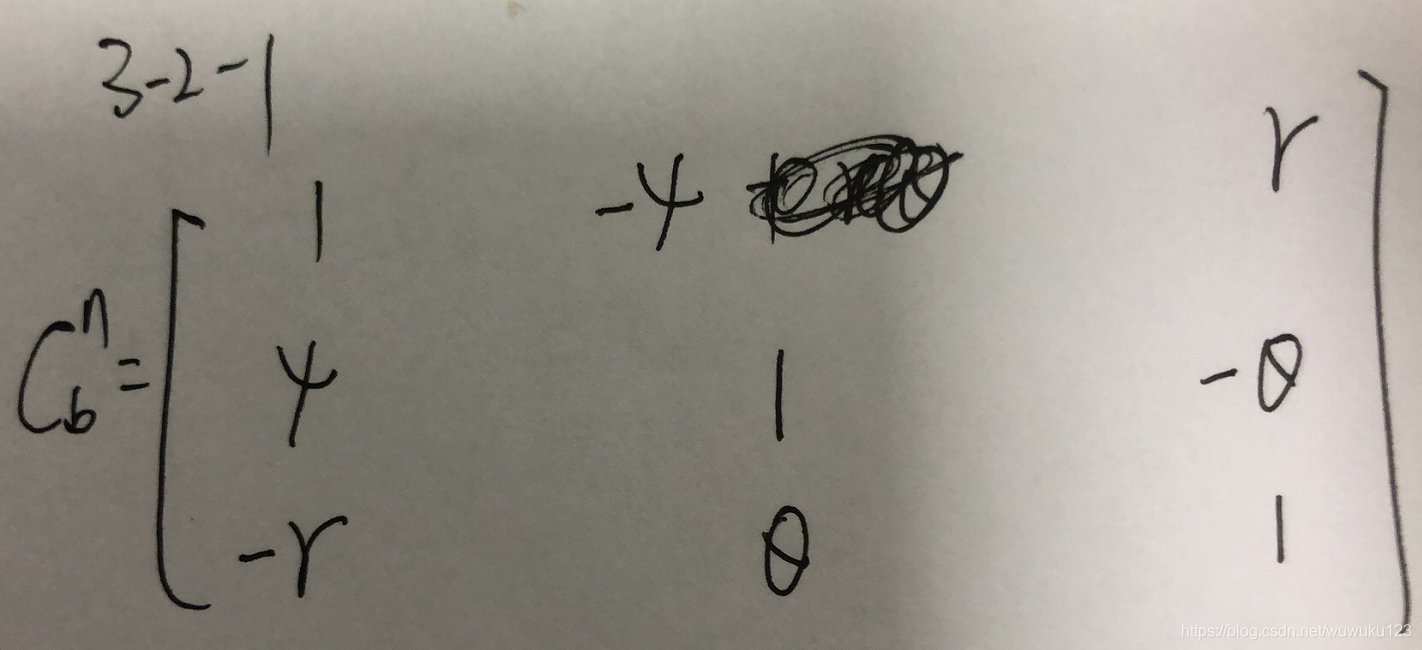
可以看出,3-1-2和3-2-1两种旋转方式;基于小角度的方向余弦矩阵是相同的;同时,可以验证出,只要经过三次基本旋转(X、Y、Z轴各转动仅且一次),最终得到的方向余弦矩阵是一样的!
用途:从上面式可以看出,在实时的姿态矩阵更新中,姿态的连续更新可以采用小角度的计算方式。P28张天光《捷联惯性导航技术》
二、误差小角度矩阵
参考:
《捷联惯性导航技术》




评论(0)
您还未登录,请登录后发表或查看评论