
永磁同步电机PMSM启动Simulink建模与仿真
学习完PMSM的基本原理之后,再根据具体的连接原则设计simulink仿真模型:主要包括一个产生三相正弦波的产生源,再两两相加减,再经过两个受控电压源保证产生一个正弦的三相电流,相位相差两两相差120。
设置sine wave的波形参数:
幅值:220sqrt(2),
频率:100pi
相位分别是-2pi/3,0,2pi/3
一个三相电的模型得以建立,相位差120度,相电流380V。
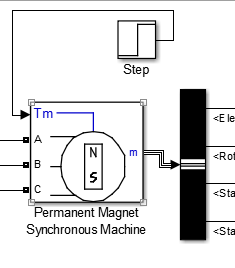
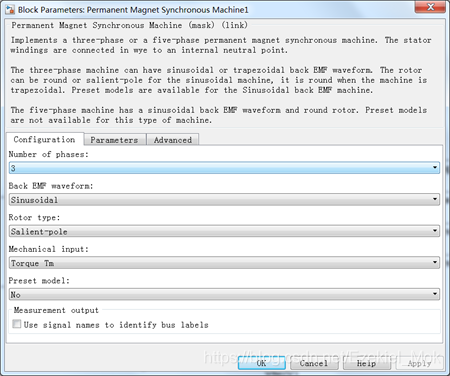
PMSM电机模块以及阶跃信号测试模块
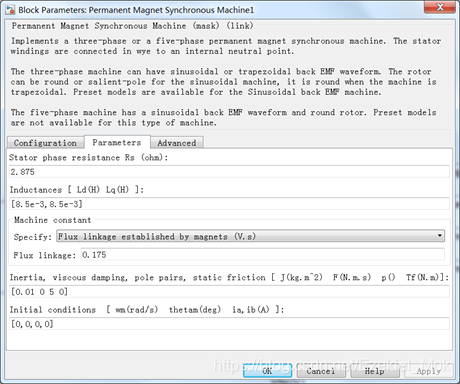
PMSM具体的参数设计:
输入电压 220V
额定转速 3000r/min
额定输出转矩 3N·m
定子绕组电阻R1 2.875Ω
直轴电感Ld 8.5mH
交轴电感Lq 8.5mH
磁链 0.175Wb
机组转动惯量J 0.01kg·m2
转轴处摩擦系数μf 0N·m·s
极对数np 5
PMSM参数设置Simulink:
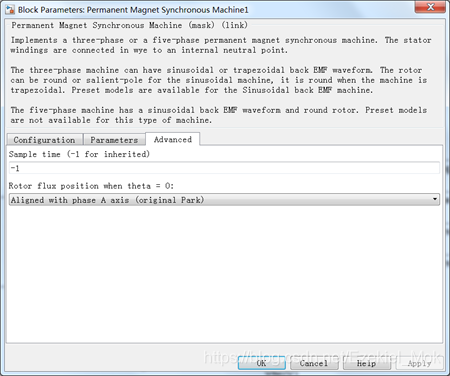
完整的PMSM电机驱动与仿真模块如下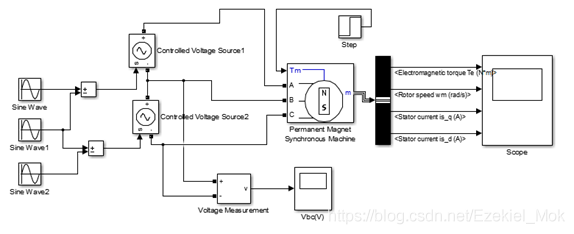
设置的仿真时间为3S
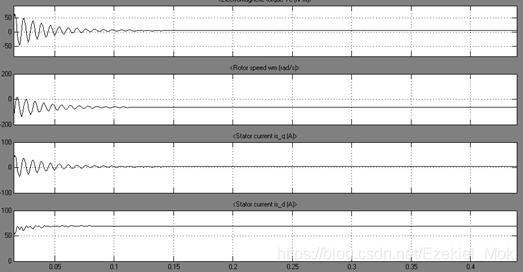
PMSM初始条件J=0.01,产生的波形如下:
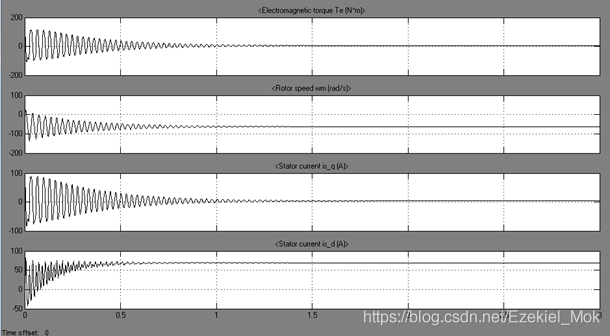
可见,当我们用转子惯性较大的PMSM电机时,会发现,启动的初始扭矩会相当的大,而且启动到稳定运转的的时间也相对较长,大概1.5秒,而且q轴的启动电流也相当大,对定子绕组的冲击较小,当转子稳定下来之后的转速也很难稳定下来。整体来说启动不稳定。
当J=0.008时的动态特性:
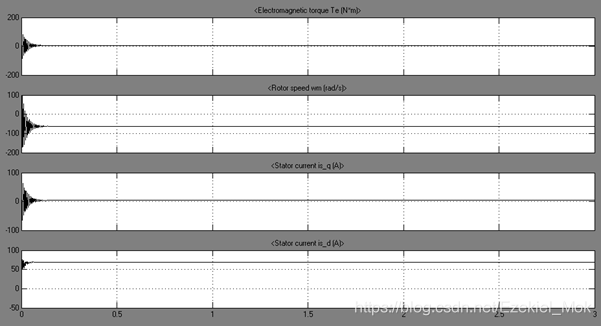
将图纸局部放大后:
可见,当我们用转子惯性较小的PMSM电机时,会发现,启动的初始扭矩会相当的较小,约为惯量为0.01的1/4,而且启动到稳定运转的很短,大概0.15秒,是J=0.01十分之一,而且q轴的启动电流很小,对定子绕组的冲击较小,安全性高,当转子稳定下来之后的转速也很容易稳定下来。整体来说启动稳定。
总结
控制原理是:
当转动惯量减少之后,系统到达稳定状态所需的时间变少了,也就是说系统的反应速度变快了。这是因为转动惯量较小的转子比较容易跟上磁场的转速。
变频的方法,使用变频器:
普通的永磁同步电机因为没有启动鼠笼,所以不能够自启动,需呀变频器启动。而异步启动永磁同步电机因为有鼠笼,可以自启动。
PMSM电动机启动时要从静止迅速升速至每分钟数万转乃至数十万转,启动转矩大,启动电流要超出普通电机额定电流的几倍。
从硬启动转化为软启动方式,启动时供给频率从小到大,一段时间后最终到达额定频率,低频时候通过调整绕组电压补偿,保证恒转矩,启动才能顺利进行而不至于烧坏电机。
串接于电源与被控电机之间,通过微电脑控制其内部的晶闸管触发导通角实现交流调压,使电机输入电压从零以预设函数关系逐渐上升,直至起动结束,赋予电机全电压,即为软起动,在软起动过程中,电机起动转矩逐渐增加,转速也逐渐增加,直到晶闸管全导通,电动机工作在额定电压的机械特性上,实现平滑启动,降低启动电流。避免启动过流跳闸。待电机达到额定转数时启动过程结束,为电机正常运行提供额定电压。
在这次仿真中,由于J取0.01的时候,所需要的启动转矩太大,当启动时,励磁电流不能使定子转动,产生很大的滞磁电流,使绕组发热严重,若是采用变频器驱动的话,在低频端保持低频,能产生较大的启动转矩驱动J,进而能很好地改善仿真中的启动问题。




评论(0)
您还未登录,请登录后发表或查看评论