

导航坐标系:东-北-天
载体坐标系:右-前-上
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角),其中航向角北偏西为正,范围【-pi pi】
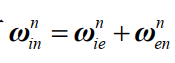
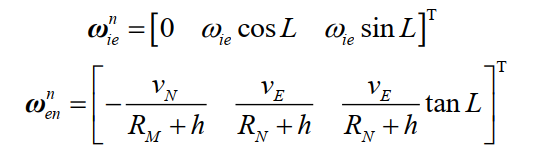
(1) 地球自转引起的导航系旋转 和 系统在地球表面移动因地球表面弯曲引起的导航系旋转:
因此,时刻不要忘记进行变量的更新。
至于为什么会有这些角速度,本质是因为IMU器件的输出是相对于惯性坐标系,而我们用户所要的计算结果一般需要在当地水平坐标系显示(经纬高、地速等信息);假设ECI为惯性系,其到当地水平坐标系需要经过上述的旋转变换才能进行解算。
(2)欧拉角速率和Wbnb是一回事吗?
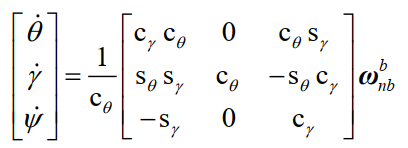
按照严恭敏讲义和代码所采纳的导航系和载体系的旋转方式为:3-1-2,可以得到方向余弦矩阵;对方向余弦求导(因为θ、γ、ψ都是时间的函数),得到欧拉角速率的方程,如下:

经过化简得到:
Cnb求导方程为: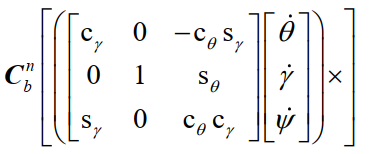
又因为:![]() ;将上两式的右边进行对比,再移项得:
;将上两式的右边进行对比,再移项得:
- Wbnb
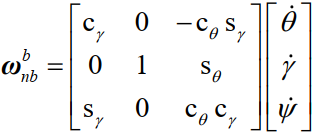
- (θ、γ、ψ)欧拉角速率方程:

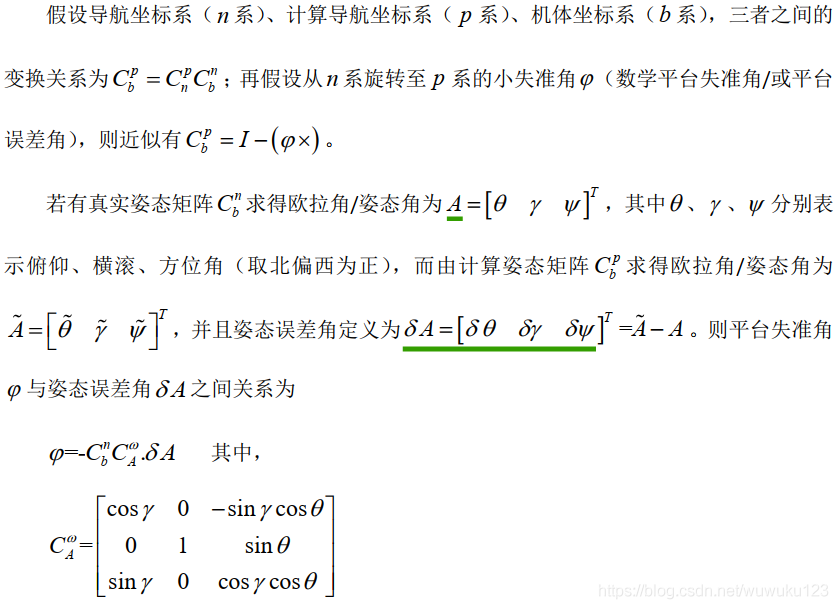
(3)平台失准角和姿态误差角:
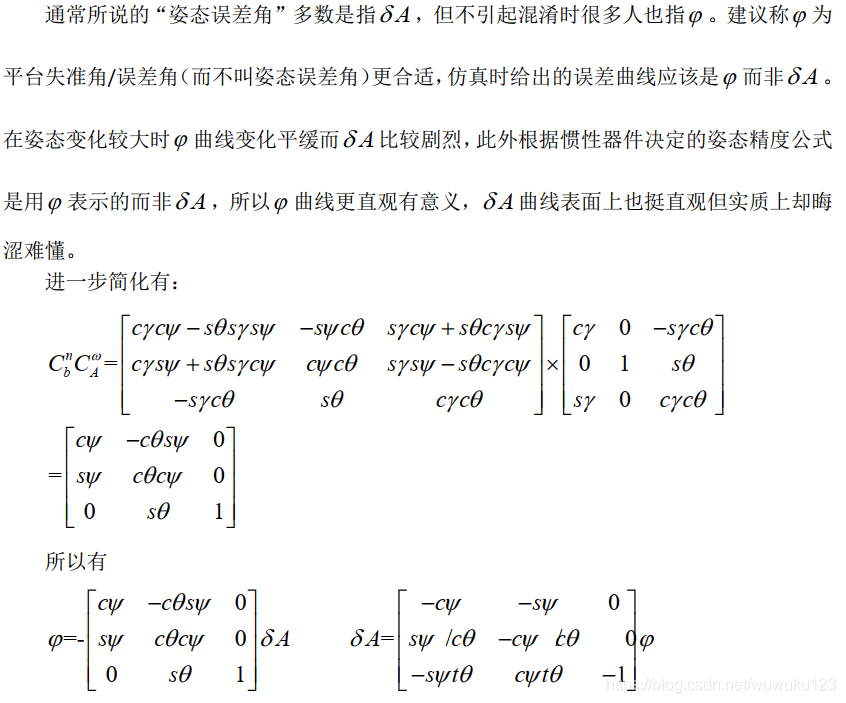
直接将严恭敏老师的原话放这里,也很好理解:
(4)常值零偏和等效常值零偏:
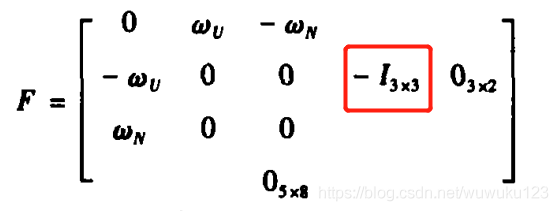
在组合导航中,一般根据系统的状态量,设计转移矩阵(F)和噪声分配矩阵(G);因为失准角和速度误差状态量中,分别含有陀螺仪和加速度计零偏项;因此F矩阵中有两种表示方式:
- 单位矩阵
比如,静基座初始对准中,用比力输出当作量测时,转移矩阵如下:
- 方向余弦矩阵
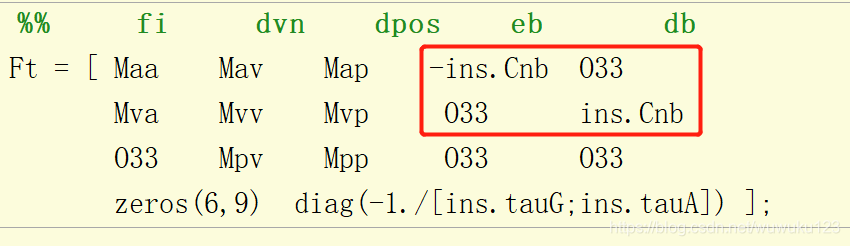
比如在15状态组合导航中,转移矩阵如下:
总结:
1、单位阵表示法,在于最后求出的陀螺仪、加速度计零偏是等效到导航系坐标轴的零偏
2、用方向余弦矩阵表示法,在于最后求出的陀螺仪、加速度计零偏是沿载体系坐标轴的零偏
参考:《捷联惯导系统静基座初始对准精度分析及仿真》
参考:




评论(0)
您还未登录,请登录后发表或查看评论