

基于学习的机器人物理交互任务实现
智能机器人技术的一个关键挑战是创造出能够直接与周围世界互动以实现目标的机器人。这些任务不仅要求机器人具备高度的感知和决策能力,还需要其具备精确的运动控制能力。在这个过程中需要明确机器人需要完成的物理交互任务是什么。这可能包括抓取物体、推动物体、开门、操作工具等。为了完成这些任务,机器人需要具备多种感知能力,如视觉、触觉和力觉等。视觉感知可以帮助机器人识别物体和环境,触觉和力觉感知则可以帮助机器人感知物体的质地和力反馈,从而更好地执行抓取、推动等操作。
机器人物理交互任务实现,它旨在利用越来越多的廉价机器人手臂和抓手,创造出能够直接与世界互动以实现其目标的机器人。学习将是这种自主系统的核心,因为现实世界包含了太多的变化,机器人无法期望预先建立一个准确的环境、其中的物体或操作它们所需的技能的模型。

人工智能是计算机科学的一个分支,其研究领域包括机器学习、计算机视觉、自然语言处理和专家系统等。
目的是处理来自力传感器的数据,这是在机器人操作物体和其信号被反馈时相关的,通过触觉装置。然后通过特征选择模块对处理后的信号进行分析。它负责通过互信息分析为手头的问题选择最相关的输入变量。在此之后,
在学习阶段,隐马尔可夫模型(HMM)对所得到的训练数据进行编码。然后在再现阶段使用得到的概率模型和改进的概率模型的高斯混合回归(GMR)来计算发送到机器人的所需控制命令。这个整体结构适合于学习简单的基于力的操作任务,
它利用了训练数据中隐含的顺序信息,也能够处理感知别名(即那些具有潜在的多值功能行为的任务)。
机器人物理交互任务实现常见的方法是阻抗控制,传统的阻抗控制框图如下:
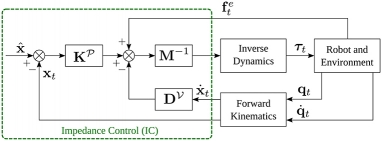
阻抗控制核心思想是根据需要控制运动和接触力之间的动态相互作用,而不是分别控制这些变量。它旨在通过控制机器人的阻抗来实现对机器人与环境交互的控制。阻抗是指机器人在受到外部力作用时所表现出的抵抗能力,它可以用阻抗矩阵来描述。
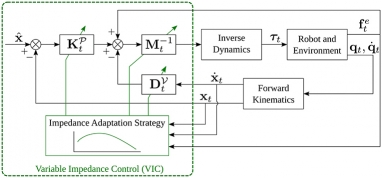
变阻抗控制是机器人技术中的一种重要的控制方法,特别是在需要机器人与周围环境进行物理交互以完成任务的场景中。其核心思想在于根据机器人末端与环境之间的实时接触力,动态地调整阻抗控制器的阻抗参数,以达到柔顺且安全的交互效果。在变阻抗控制中,通过调整机器人的惯性、阻尼和刚度等参数,可以有效地改变机器人末端在受到外力作用时的响应特性。例如,在需要机器人末端呈现较大柔顺性的场景中,可以减小刚度系数,使接触力变小;而在需要机器人末端保持一定刚性的场景中,则可以适当增大刚度系数。此外,调整阻尼参数也可以影响机器人末端的力响应特性,如减小超调、降低力峰值等。变阻抗控制的优势在于其能够根据任务需求和环境变化,灵活地调整机器人的阻抗特性,从而在保证任务完成的同时,最大限度地避免对环境和机器人自身的损害。这种控制方法在提高机器人作业效率、保证作业安全以及增强机器人对环境的适应性等方面具有显著的效果。
机器人操作的环境往往复杂多变,物体的形状、位置、材质等都可能发生变化。基于学习的变阻抗控制能够根据机器人与环境的实时交互数据,通过学习和优化算法,动态地调整阻抗参数,以适应这种变化。这使得机器人能够在各种复杂环境中都能保持稳定的操作性能。通过调整阻抗参数,变阻抗控制能够改变机器人在与环境交互时的力响应特性。基于学习的方法能够更精准地找到最优的阻抗参数组合,从而实现更高的柔顺性和安全性。基于学习的变阻抗控制能够根据历史数据和实时反馈,不断优化机器人的运动轨迹和力输出,从而提高作业效率和精度。基于学习的变阻抗控制使得机器人能够根据经验和学习结果,自主地调整其行为以适应环境变化。
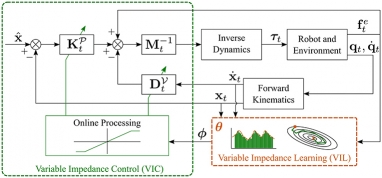
变阻抗学习算法是一种结合了阻抗控制和机器学习技术的算法,为了使机器人能够根据不同的环境和任务需求,自适应地调整其阻抗参数,以实现更精准、高效和安全的物理交互。机器人与环境进行交互,收集交互过程中的数据,包括机器人末端的位置、速度、加速度,以及与环境之间的接触力等。对收集到的数据进行预处理,如滤波、去噪、归一化等,以提高数据的质量和一致性。根据机器人的动力学特性和任务需求,建立阻抗控制模型。从预处理后的数据中提取与阻抗控制相关的特征,如力的大小、方向、变化率等。选择合适的机器学习算法,如神经网络、支持向量机、强化学习等,用于学习阻抗参数与机器人性能之间的关系。根据问题的性质和学习算法的特点,设计合适的学习架构和参数优化策略。在机器人与环境进行实时交互的过程中,利用学习算法对阻抗参数进行在线学习和调整。根据实时反馈和性能评估结果,动态地更新阻抗参数,以优化机器人的物理交互性能。

斯坦福大学工程师的一项新成果发布于国际学术顶刊《科学》的子刊《科学·机器人学》上。
斯坦福大学工程师的最新研究成果“farmHand”机械手确实是一个引人注目的创新。受壁虎脚趾抓地机制的启发,这款机械手能够展现出微妙而精准的力量控制,实现了对多种物体的平稳抓握,从脆弱的鸡蛋到圆形的葡萄,再到大型的篮球都能轻松应对。壁虎脚趾的粘附机制为“farmHand”提供了宝贵的灵感。壁虎能够利用其脚趾上的微小毛发与表面之间的分子间作用力,实现强大的粘附效果,同时又能轻松脱离,这种特性使得壁虎在各种表面上都能自如地攀爬。斯坦福大学的研究人员将这种机制引入机械手的设计中,使得“farmHand”能够模拟壁虎的抓握方式,实现既灵巧又稳健的抓握。

鸡蛋和葡萄作为测试对象,具有不同的物理特性。鸡蛋表面光滑且脆弱,需要机器人以精细且稳定的力度进行抓握,以防止破裂。而葡萄则较小且形状圆润,需要机器人具备更高的精确度和灵活性来准确抓取。因此,通过这两种物体的测试,可以全面评估机器人在不同情况下的交互控制能力。这种测试还可以用于评估机器人的自适应性和学习能力。机器人在面对不同物体时,需要能够自动调整抓取策略和力度,以确保成功抓取并避免损坏物体。通过抓取鸡蛋和葡萄的测试,可以观察机器人在面对不同挑战时的应对能力,并验证其交互控制系统的有效性。

Optimus二代具备较高的自适应性和学习能力。它可以通过不断的学习和优化,逐渐提高在抓取不同物体时的准确性和稳定性。这种能力使得Optimus二代能够应对更多复杂的场景和任务。在抓取准确性方面,视频显示,Optimus二代可以轻松准确地抓取、拿起、放下鸡蛋,中间不会掉下来,左手转右手的整个过程也极为连贯,显示出Optimus二代的精准物体操控能力。

参考文献:
【1】https://www.frontiersin.org/articles/10.3389/frobt.2020.590681/full
【2】斯坦福“机械手”成精!优雅取鸡蛋,剽悍运篮球,登《科学》子刊_腾讯新闻 (qq.com)
【3】https://www.science.org/doi/10.1126/scirobotics.abi9773
【4】马斯克公布最强人形机器人Optimus二代,轻松抓鸡蛋、做深蹲,步速快30%_澎湃号·湃客_澎湃新闻-The Paper
【5】《马斯克公布最强人形机器人Optimus二代,轻松抓鸡蛋、做深蹲,步速快30%》


评论(0)
您还未登录,请登录后发表或查看评论