描述 原文:DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs DeepLabv2与DeepLabv1相比,从标题到内容都很像,只不过将一些知识讲的更清楚,并提出了atrous spatial pyramid pooling (
感受野 感受野(Receptive Field),指的是神经网络中神经元“看到的”输入区域,在卷积神经网络中,feature map上某个元素的计算受输入图像上某个区域的影响,这个区域即该元素的感受野。 理解简化:在卷积神经网络的某feature map上的某个元素,它存在一个感受野,感受野大小为输入图像的某块区域。这块区域的像素值一层层卷积、pooling等操作最终计算出了这个元素的值。输入图像
A Survey on 3D Gaussian Splatting论文:https://arxiv.org/abs/2401.03890 一、文章概述 1.问题导向 基于图像的3D场景重建时机器理解现实世界环境复杂性的基础,促进了3D 建模和动画、机器人导航、历史保存、增强/虚拟现实和自动驾驶等广泛应用。3D 高斯抛雪球被视为下一代3D重建和表示的潜在游戏规则改变者,开辟了大量的应用程序,具有巨大
论文地址:https://arxiv.org/abs/2308.04079项目:https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/代码:git clone https://github.com/graphdeco-inria/gaussian-splatting —recursive 一、文章概述 1.问题导向 辐射场:辐射场是三维
论文:https://arxiv.org/abs/2003.08934TensorFlow代码:https://github.com/bmild/nerfPyToch代码:https://github.com/yenchenlin/nerf-pytorch 一、文章概述 1.问题导向 从新视点生成照片级真实感输出需要正确处理复杂的几何体和材质反射比属性。目前还没有一种方法可以生成照片级的场景渲染,
出处:https://blog.csdn.net/m0_66307842/article/details/128570468?spm=1001.2014.3001.5501作者:流继承 Ⅰ. 边缘检测算法 0x01.Canny边缘检测 Canny边缘检测算法是由4步构成,分别介绍如下: 第一步:噪声去除由于边缘检测很容易受到噪声的影响,所以首先使用高斯滤波器去除噪声,在图像平滑那一章节
1.github官网下载源码2.配置深度学习环境3.下载模型4.照片上色代码 from deoldify import device from deoldify.device_id import DeviceId #choices: CPU, GPU0...GPU7 device.set(device=DeviceId.GPU1) from deoldify.visualize imp
1、概述 Mahalanobis 距离分类广泛用于聚类。该方程有一个协方差矩阵,它作用于类的变化以创建相似性。 在 Matlab 中,我们有一个函数 'mahal' 可以计算一个点和一个样本子集之间的距离。 让我们使用 Mahal() 函数对 RGB 图像进行聚类。 原始图片如下。 2、实现过程 让我们根据颜色(即 RG
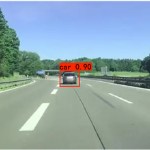
Darknet训练自己数据集之木材识别并计数 一直没有用Darknet训练过自己的数据,最近拿Yolov3尝试了一下,效果很好,记录一下。Ubuntu系统使用Darknet还是很方便的,如何编译就不说了,直接讲训练过程。这里用了60张木材照片,用来识别木材的数量 做好标注后,将img文件夹放进data目录下 将train.txt放进data目录下 将obj.names放进dat
验证码识别之Tesseract-OCR 最近在写一个关于验证码识别的程序,但效果总是不好,对于最简单的验证码,对于图像的预处理是最基本的,但是处理完成并分割后,预处理部分后面有时间再写,主要问题是处理完之后识别过程。因为没使用深度学习的相关内容,最开始想到的是模板匹配,手动将10个数字裁剪出来之后,用了10个if,判断哪个可信度最大,但是特别的差,后来不得不想其他办法。然后使用了SVM,利用已有
迁移学习(图像分类) 在本教程中,您将学习如何使用迁移学习训练卷积神经网络以进行图像分类。您可以在 cs231n 上阅读有关迁移学习的更多信息。本文主要目的是教会你如何自己搭建分类模型,耐心看完,相信会有很大收获。废话不多说,直切主题…首先们要知道深度学习大都包含了下面几个方面:1.加载(处理)数据2.网络搭建3.损失函数(模型优化)4 模型训练和保存把握好这些主要内容和流程,基本上对分类模型就
PaddleOCR手写文字识别 一. 项目背景 二. 环境配置 三. 数据构造 四. 模型微调 五. 串联推理 六. 注意事项 七. 参考文献 光学字符识别(Optical Character Recognition, OCR),ORC是指对包含文本资料的图像文件进行分析识别处理,获取文字及版面信息的技术,检测图像中的文本资料,并且识别出文本的内容。 PaddleOC
前言 RGB色彩空间是一种被广泛接受的色彩空间,但是该色彩空间过于抽象,我们不能够直接通过其值感知具体的色彩。我们更习惯使用直观的方式来感知颜色,HSV色彩空间提供了这样的方式。通过HSV色彩空间,我们能够更加方便地通过色调、饱和度和亮度来感知颜色。 其实,除了HSV色彩空间,我们讨论的其他大多数色彩空间都不方便人们对颜色进行理解和解释。 基础知识 HSV色彩空间从心理学和视觉的角度出发,
今天的任务是教会大家利用Matlab对大肠杆菌细胞进行计数这是一个非常基础的图像任务,利用Matlab能够快速的实现。 让我们,先看看我们今天要处理的图像长什么样子: 看上去,很乱很复杂哈,有没有!其中绿色部分为大肠杆菌,红色部分为其他杂质。 去除红色杂质细胞 在这里我们的思路是将原图转换到HSV空间,新建一个黑色背景,将绿色的大肠杆菌复制到黑色背景里面。 Ecoli_hsv = r
视觉里程计 视觉里程计是VSLAM中的前端部分,而特征追踪是视觉里程计中的一个基础和关键的任务,它的作用是从两张或者多张图片中识别对应相同或相似的内容。通过追踪图像中局部特征在前后帧图像中的位置,可以实现视觉运动估计这个工作。 但是需要提及的是特征的抽取及匹配是整个VSLAM系统中最耗时的计算过程之一,所以如何实现快速且鲁棒的特征点检测匹配算法也是研究VSLAM一个重要的话题。 局部特征
前言 在上一个Part,我们知道了坐标转换的一些基础只是,其实三维空间的刚体运动与其也有紧密的联系,可以理解为刚体运动为持续的把运动坐标系中的坐标变换到固定坐标系中,此外再加上旋转这一过程。 世界坐标系与里程计坐标系 世界坐标系:世界坐标系(world坐标系)一般指固定坐标系,在系统运行过程其全局坐标不发生改变。在建图时,经常会认为起点为世界坐标系原点,而本体初始旋转角度为0。里程计坐标
前言 在 相机投影及相机畸变一文 中,已经和大家介绍了三维世界到二维世界的图像投影和图像畸变及其去除相关问题。有了内参,我们可以一定程度的还原相机到底看到了什么。但是相机观测的数据还是处于相机坐标,我们还需要将局部观测转变到全局观测上来。将传感器坐标系观测转换到载体坐标系需要通过外参。本章将介绍坐标系转换及相机外参这两部分内容。 坐标系变换 坐标系变换其实在解决同一个物体在不同坐标系观察下的
SLAMSLAM(Simultaneous Localization and Mapping),意为同时定位与建图。看名字比较难理解,但是结合到日常生活中的例子就很好懂了。想象一下到了一个陌生环境中,比如你现在的某个陌生的迷宫里面,你需要找到出去的路,一开始你不知道自己在哪所以只能凭感觉四处走动,但是在行走过程中你还是很聪明的做了一些标记,当突然走到一个位置,你发现目前这个场景好熟悉,是不是哪里见
作者ID: 流继承 Ⅰ. 数字图像的表示 0x00 位数 计算机采用0/1编码的系统,数字图像也是利用0/1来记录信息。我们平常接触的图像都是8位数图像,包含0~255灰度。 0:代表最黑 1:表示最白 0x01 二值图像 一幅二值图像的二维矩阵仅由0、1两个值构成; “0”代表黑色,“1”代白色。由于每一像素(矩阵中每一元素)。 其取值仅有 0 和 1 两种可能
时间与运动 3.1 轨迹 轨迹是具有特定时间属性的一条路径。 3.1.1 平滑一维轨迹 一个真正的机器人关节都有一个额定的最大速度,而且为了使关节运动时间最短,应使其运行在最大速度上的时间尽可能长。因此我们希望速度曲线的顶部是一条直线。 混合曲线轨迹:延长最大速度运行时间,使得速度曲线顶部为一平直线,两侧为加减速段。 3.1.2 多维的情况 大多数实用的机器人都有一个以上的运动轴或自
第三方账号登入
看不清?点击更换




















第三方账号登入
QQ 微博 微信