

1.正向动力学的计算方法
略
2.MATLAB计算正向动力学
使用 SerialLink.fdyn()计算正向动力学,其主要调用格式:
[T,q,qd]= SerialLink.fdyn(T,torqfun)。T表示时间间隔(采样时间),torqfun表示给定的力矩函数,以此求出关节角度和关节角速度。
此外,可以使用 SerialLink.accel()可以进一步计算关节角加速度,主要调用格式:
qdd=SerialLink.accel(q,qd,t)
其中,t为关节角驱动力矩
3.Simulink计算正向动力学
在大二上学期的一段时间专门看了有关simulink用于建立数学模型的知识,并搜集了一些资料。
关于Simulilnk相关预备知识,可以查看以下链接:
https://wenku.baidu.com/view/75ad4fcc2dc58bd63186bceb19e8b8f67c1cef9f.html 这个有100+页,值得慢慢学习
https://wenku.baidu.com/view/3ba19896da38376bae1fae1e.html
依我的理解,我们可以浅显地认为simulink是用更直观的方式来处理信号输入,信号处理和信号输出的过程的有力工具,尤其是在信号处理的这一过程。
在这里只是开个头,具体内容在之后会有更具体的介绍
机器人工具箱中的示例: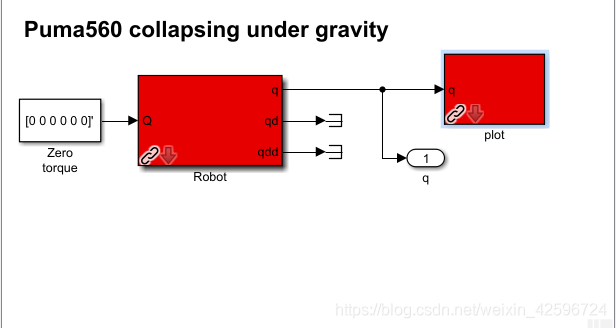
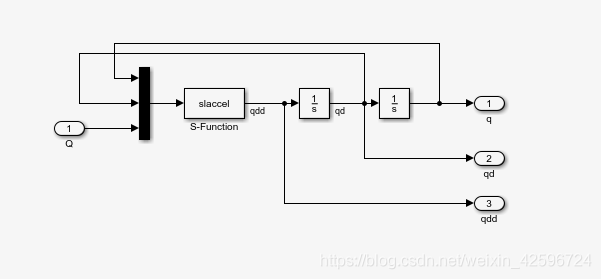
这样的子系统(Robot)实际上体现了一种模块化思想
参考资料:
杨辰光, 李智军, 许扬,机器人仿真与编程技术[M].北京:清华大学出版社,2018




评论(0)
您还未登录,请登录后发表或查看评论