

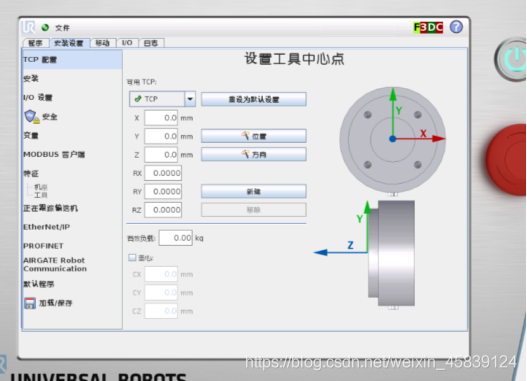
ur机器人编程学习-安全设置
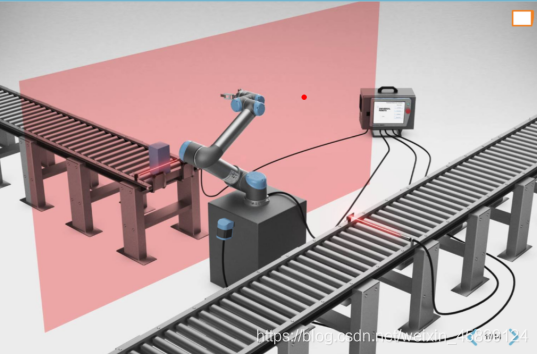
定义边界,机器人不允许进入区域
机器人在正常工作时,当人进入区域,进入限制模式
1.设置安全扫描仪
1)将扫描仪安装
2)将黄色连接器连接扫描仪

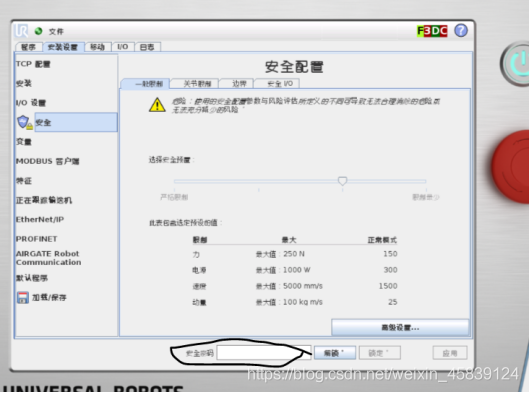
3)单击设置机器人,选择设置密码
4)单击设置密码,并单击更改安全密码,单击应用


5)单击安装选项卡下安全,单击安全密码字段,输入安全密码,单击解锁
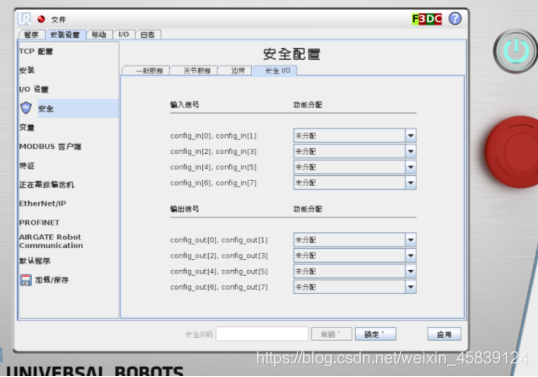
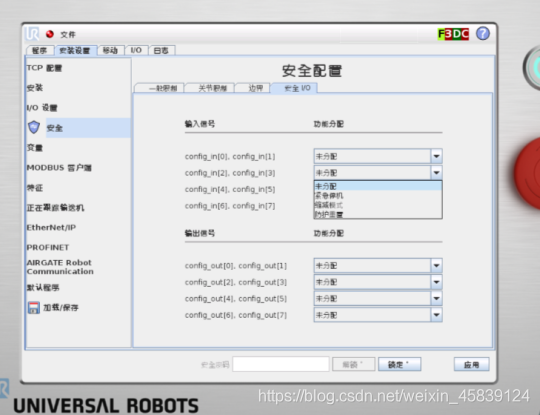
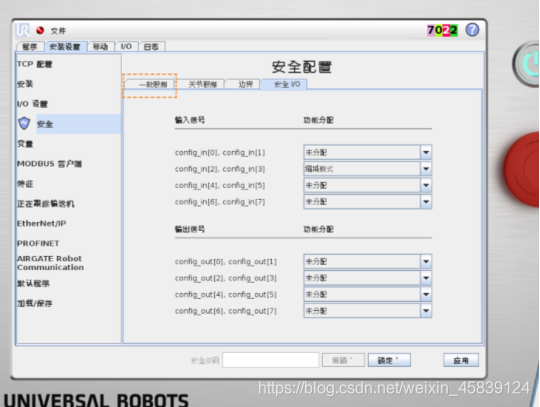
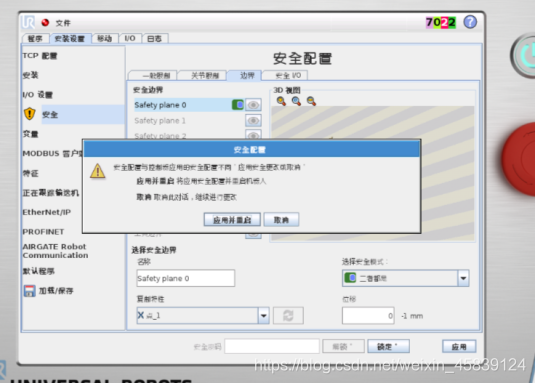
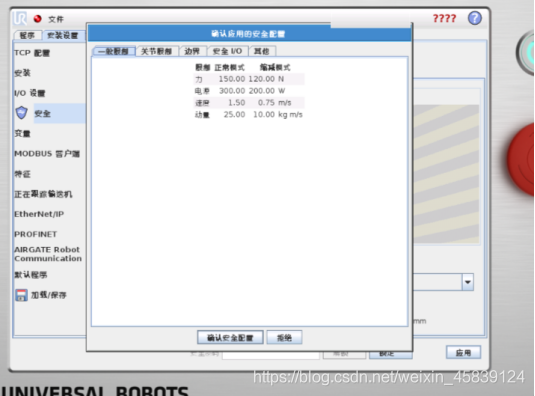
6)单击安全i/o选项卡,单击输入信号下拉菜单,选择缩减模式,单击应用,选择应用并重启,下载到控制器,单击确认安全配置
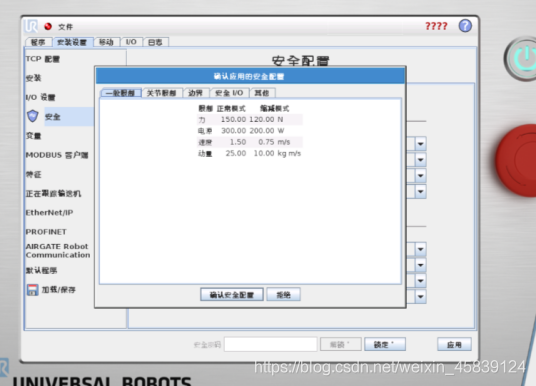
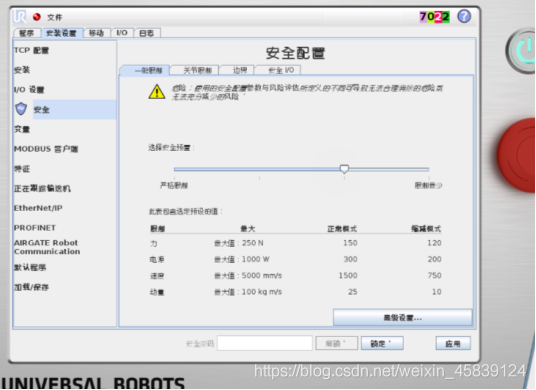
7)单击一般限制选项卡,可以设置力度,功率,可以通过滑块设置安全限制
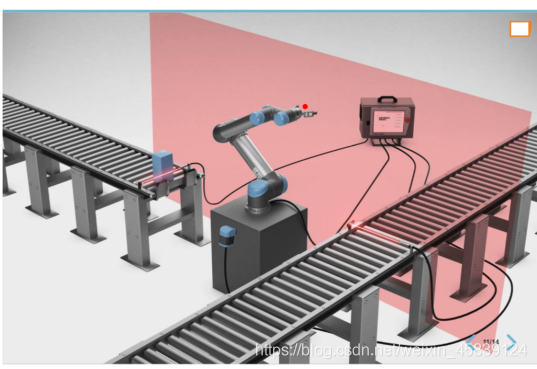
2.设置机器人工作边界
当进入机器人工作边界,就会保护性停止
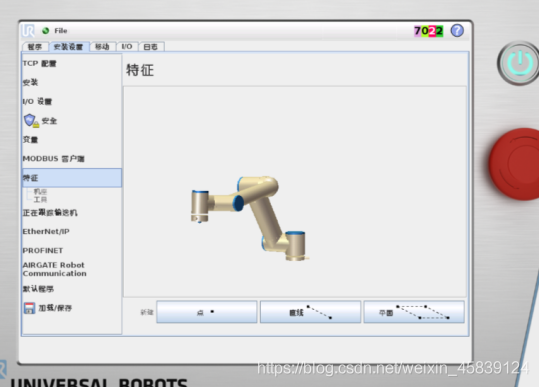
1)单击安全设置中的特征选项,使用点是设置安全区域一种方式
2)单击点,点1插入到特征菜单中,单击点1,单击设置此点
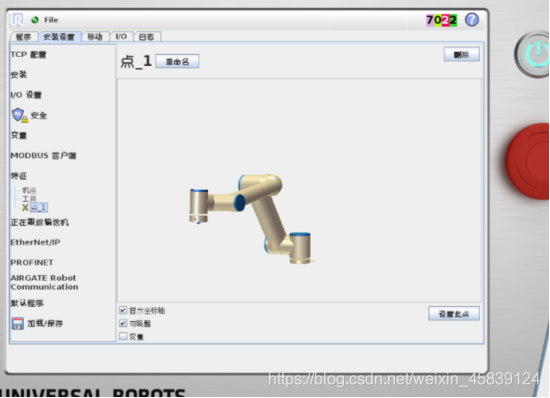
3)将机器人拖动到设定边界,虚拟墙设置,虚拟墙是垂直于z轴的,单击确定,将该位置保存。
4)创立了边界,可以通过此边界创建安全区域。
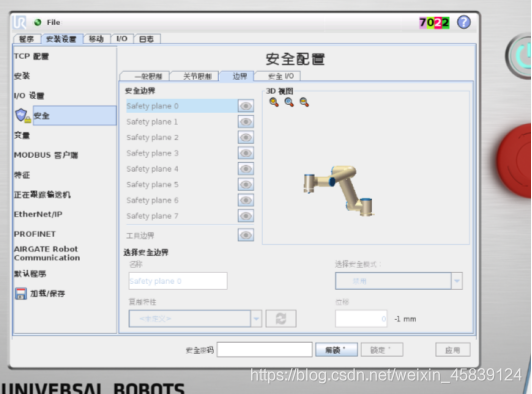
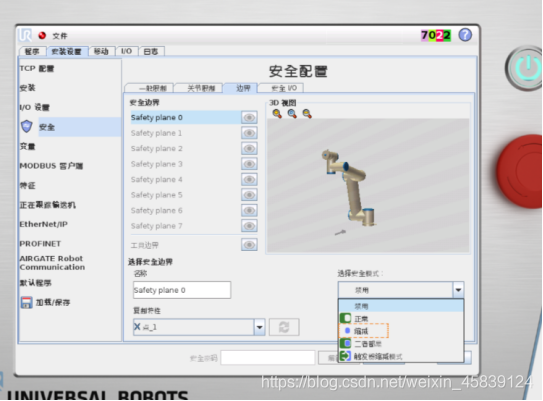
5)单击安全设置选项卡中的安全按钮,再次单击安全密码字段,单击解锁,并单击边界选项卡,可以设置8个安全边界,单击复制特性下拉菜单,选择刚刚创建的点1

6)选择安全模式的下拉菜单,选择二者都是,单击应用,并单击应用并重启,单击确认安全配置
触发缩减:在缩减模式下机器人才会触发
正常:在正常运行下才会触发
二者都是:机器人不允许进入区域
")


评论(0)
您还未登录,请登录后发表或查看评论