

ur机器人编程-与外部设备互动

添加夹爪命令,改变有效载荷命令在i/o中,可以看到夹爪

将工具拖到第一个传感器sensor1,会发现i/o中传感器点亮
插入等待命令
1.单击movej
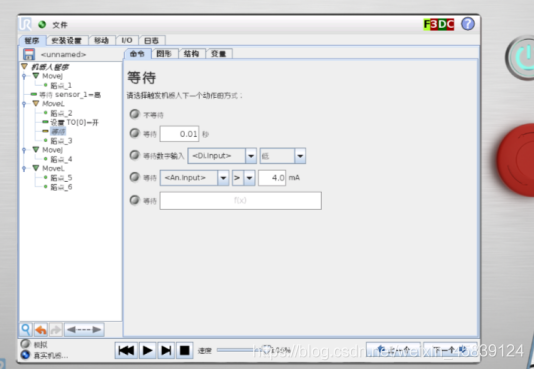
2.单击结构选项卡,单击等待命令,等待命令被插入到命令选项卡
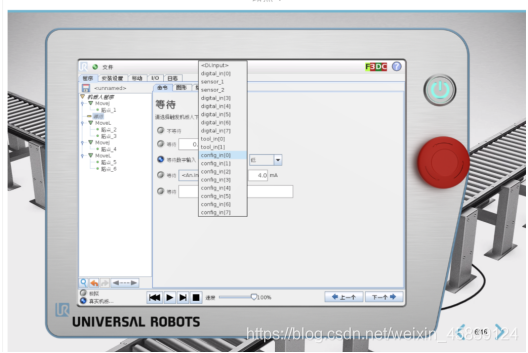
3.单击命令菜单,选中等待数字输入命令,在第一个下拉菜单中选中sensor1,在第二个下拉菜单中选择高
4.单击路点2,单击结构选项卡,单击设置按钮,并选择命令选项卡
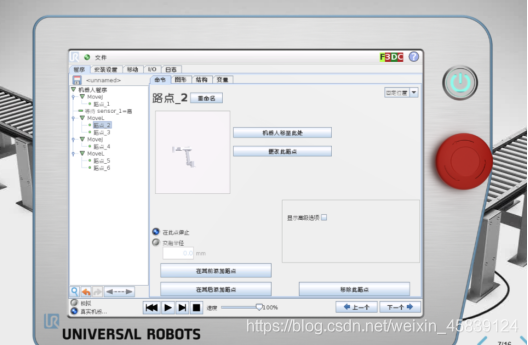
5.设置数字输出信号,在第一个下拉菜单中选择工具输出0,在第二个下拉菜单中选择高(此命令让夹爪夹住工件),单击复选框,设置有效负载荷为工具+工件命令

5.夹爪夹住工件需要一定时间,需要插入等待命令,单击结构选项卡,单击等待,单击命令选项卡,并选择定时等待选项,输入1s
6.等待箱子过来再放工件,单击路点4,单击结构选项卡,单击等待按钮,单击命令选项卡,并选择数字输入,在第一个下拉菜单选择sensor2,在第二个下拉菜单选择高(机器人在路点4等待)
7.放入工件也需要时间,单击路点5,单击结构选项卡,单击设置,单击命令选项卡,设置数字输出信号(夹爪松开),在第一个下拉菜单,第二个不变,设置新有效载荷
8.夹爪需要一定时间松开,插入等待命令,在结构选项卡,单击等待按钮,单击设置命令,单击定时等待,设置1s。
设置完成,准备测试
")


评论(0)
您还未登录,请登录后发表或查看评论