

本节介绍非完整系统中的拉格朗日方程,前面遗留的一些问题、或者隐含的问题,大多会在本节得到解决。
4. 非完整系统中的拉格朗日方程
前面的保守场/非保守场的拉格朗日方程推导中, 相互独立是一个很重要的条件,也就是系统必须是完整系统,而在“1.系统约束与虚位移”一节中我们已经提到过,在非完整约束情况下,
并不相互独立,前面介绍的拉格朗日方程推导过程也就失效了,因此本节将重点介绍在
不相互独立情况下(存在非完整约束情况下)的拉格朗日方程推导的问题。
当 相互独立时,有
中
前的系数为零,现在这一条件不成立了,有了
个不独立的
,能否得到类似前述的拉格朗日方程的式子?我们使用待定乘子法来推导。
假设系统已经具有 个广义坐标,同时受到
个约束:
将约束方程写成变分的形式:
引入 个待定系数
与上式中的
个方程相乘,然后对这
个方程求和
将上式与 联立,可得
虽然在 个
中有
个是不独立的,无法像之前一样直接得出
的系数为零,但我们仍可以适当地选取
个待定系数
使得
的所有系数全等于零,由此可以得出
这 个方程即为非完整系统中的拉格朗日方程,也被称为罗斯方程。将这
个罗斯方程与
个约束方程联立,即可求出
个未知数
。
需要注意的是:
- 我们是以非完整系统为引子来推导罗斯方程的,但该方程也适用于完整系统,因为完整约束也满足约束方程
;
- 不同于前面所有形式的拉格朗日方程,这种形式的拉格朗日方程推导不需要“
相互独立”这一条件,而是用待定乘数使得系数强制取零,那么在使用此方程时,我们甚至不需要选取独立的坐标来描述系统,广义坐标的选取又变得任意起来。
随着学习的进行,我们对广义坐标的认识也逐渐变得深刻,到这里,我们可以重新思考广义坐标的选取了,它并不一定需要取独立坐标,它可以任意取,只要能够描述系统的位形即可,但还是尽量取独立坐标,这样可以有效减少计算量。
下面的例子我们可以看到广义坐标选取的任意性,并体会到计算量的区别所在。
例2-4. 如图2-6所示单摆,写出其运动方程。
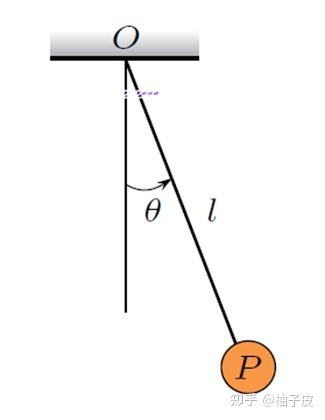
解:
先选取广义坐标为 ;
系统受到的约束为 ;
将约束写成标准形式即 ;
故有 ;
1). 基于完整系统的拉格朗日方程计算:为了使得 相互独立,我们需要判断约束的种类,可以判断出两个约束均为完整约束,因此该问题可以使用完整系统的拉格朗日方程解决,独立坐标数为1,我们可以取一个广义坐标,例如取
,来继续下一步的动力学计算。
系统的动能和势能可以写为:
系统中不存在非保守外力与阻尼力,故 ;
至此,我们可以列出完整系统的拉格朗日方程:
可得
2). 基于非完整系统的拉格朗日方程计算:就使用原初设定的广义坐标进行计算
系统的动能和势能可以写为:
系统中不存在非保守外力与阻尼力,故 ;
至此,我们可以列出罗斯方程
广义坐标 :
广义坐标 :
广义坐标 :
可得
与约束方程 联立,可以得到
两种方法的结果是一致的,这也印证了前面的说明:罗斯方程也适用于完整系统,带来更大的计算量,但其所需的思维量变少了,无需顾忌约束的类型,也不需要根据独立坐标数选择广义坐标。
还有个问题值得我们思考:推导罗斯方程过程中使用的待定乘子法,其本质是什么?
我们对罗斯方程进行一些倒推,已知
因此有
即
对照拓展哈密顿原理 ,可以发现形式非常类似!实际上,拓展哈密顿定理表征动力学过程使得泛函
取极值;再来观察最上面的式子,它表征在约束条件
下,令泛函
取极值。
有没有什么发现?这种待定乘子法就是高等数学中介绍过的拉格朗日乘数法,待定乘子 就是拉格朗日乘子。
之前内容:
参考文献:F. Daqaq. Dynamics of particles and rigid bodies: a self-learning approach[M]. Hoboken, NJ: John Wiley & Sons, 2018.




评论(0)
您还未登录,请登录后发表或查看评论