串联机器人常见的工业机器人是串联臂,经常在电视里看到,长这样,每一节手臂都是串联在前一节上的,优点是动作范围大,缺点是刚性不好,速度相对较慢。 3轴4轴并联机器人工业中还有一大类是并联机器人3轴4轴并联臂一般长这样:3根主动臂驱动6根从动臂,末端执行平台的运行轨迹始终平行于底部工作台。第4轴就是从中间伸一根旋转轴,驱动末端平台可以旋转运动注意始终平行这几个字,这就是3轴4轴并联机器人的缺点
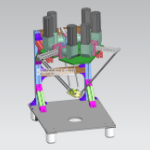
6轴并联机器人,6轴运动展示6轴并联机器人,6轴运动展示,包括XYZ轴方向的移动,和围绕XYZ轴的旋转,每一组的2根驱动臂是分别驱动的,这也是有6个自由度的关键。伺服电机驱动的工业级产品正在开发中,可用于生产线上产品的捡拾,装配,和搬运视频:6轴并联机器人_6轴运动展示
2021年的工作展望,打算以一已之力做一个6轴并联机器人的全套设计,包括机械结构,电路设计,运动算法,单片机的控制软件,电脑端的控制界面等。最终目标是通过手动示教,来写几个毛笔字。惊叹于故宫的写字人钟,准备做一个这样的东西致敬一下前辈。先观摩一下这个钟。这个钟是两百多年前,英国伦敦威廉森送给大清皇帝乾隆的,纯机械结构。惊叹,佩服,五体投地。 视频:叹为观止的故宫收藏-写字人钟 本项目是在我
简介 视觉机械臂是智能机器人的一个重要分支,它主要包括控制芯片、驱动电路、机械臂、相机等部分。自主抓取是指,在没有人为干预的情况下,视觉机械臂系统通过摄像头获取到目标物体的位置,并且通过驱动机械臂来完成对于目标物体的抓取任务。 整个抓取过程大致分为以下几步(含图中九步):相机标定——→相机和机械臂进行手眼标定——→①读取摄像头信息——→②识别出目标物体并得出位姿——→③物体在相机中的二维坐
1. VOFA+是啥 简单地来说,VOFA+是一个超级串口助手,除了可以实现一般串口助手的串口数据收发,它还可以实现数据绘图(包括直方图、FFT图),控件编辑,图像显示等功能。使用VOFA+,可以给我们平常的PID调参等调试带来方便,还可以自己制作符合自己要求的上位机,为嵌入式开发带来方便。 这个是VOFA+的官网VOFA+ | VOFA+。 2. 如何使用VOFA+调试PID 2
前言 移动机器人的状态估计需要用到很多传感器,因为对单一的传感器来讲,都存在各自的优缺点,所以需要一种多传感器融合技术,将机器人的状态估计出来。对于移动机器人来讲,自身可能携带: 惯导 轮速里程计 激光里程计 视觉里程计 gps等 如何利用各传感器的优点,将所有数据结合起来,取长补短,就用到了本篇博客介绍的内容 robot_localization ,一个移动机器人状态估
地平线RDK套件概述 Horizon Robotics Developer Kits,简称地平线RDK套件,是基于地平线智能芯片打造的机器人开发者套件,包括RDK X3(旭日X3派)、RDK X3 Module(旭日X3模组)。 产品介绍 RDK X3(旭日X3派) 是一款全功能开发板,具备强大的处理能力和丰富的外设接口,通过搭配丰富的传感器和扩展组件,为开发者提供了灵活的硬件扩展和连接选项
前言 上一篇,给大家介绍了平衡小车的硬件资源及其小车底层硬件介绍篇 平衡小车学习教程1——硬件资源及其小车底层硬件介绍篇 这篇来教大家如何快速的使用MPU6050自带的DMP库读取陀螺仪数据,读取翻滚角(Roll)、俯仰角(Pitch)、航向角(Yaw)这三个角的数据。 如何快速的使用MPU6050自带的DMP库读取陀螺仪数据,读取翻滚角(Roll)、俯仰角(Pitch)、航向角(Yaw)
目录 一、SPI通信协议 1.1 SPI物理层 1.2 SPI协议层 二、实战 2.1 SPI控制FLASH实现全擦除代码编写 2.2 上板验证 一、SPI通信协议 1.1 SPI物理层 SPI通信模式为主-从模式 ,分为一主一从、一主多从: 片选线CS用于主机选择对应的从机进行通信,片选线置低电平为通信开始信号,被拉高则为开始信号。
文章目录 《从零开始配置树莓派控制机械臂》专栏传送门 1. 安装OpenCV-Python 2. 图形化界面的安装 3. 安装机器人操作系统ROS 《从零开始配置树莓派控制机械臂》专栏传送门 【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(一) 【分享】从零开始在树莓派4B上搭建环境,使用r
文章目录 《从零开始配置树莓派控制机械臂》专栏传送门 1. 安装OLED驱动,显示系统信息 《从零开始配置树莓派控制机械臂》专栏传送门 【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(一) 【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(二) 【分享】从零开始在树莓派
文章目录 《从零开始配置树莓派控制机械臂》专栏传送门 1. 控制RGB灯 2. 控制蜂鸣器 3. 控制单个舵机 4. 读取舵机当前的位置 5. 一次控制6个舵机 6. 机械臂上下左右摆动 7. 机械臂跳舞 《从零开始配置树莓派控制机械臂》专栏传送门 【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofb
文章目录 《从零开始配置树莓派控制机械臂》专栏传送门 0. 准备阶段 1. 在电脑上下载所需软件及镜像文件 2. 安装镜像文件 3. 进入树莓派系统 4. 安装树莓派配置工具raspi-config 5. 更换系统软件源 6. 安装I2C工具和I2C-Python环境 7. 安装JupyterLab 《从零开始
PID简介 讲解PID的文章书籍很多,本文就不详细讲了,只讲一下我在学习过程中不容易理解的一些问题点,以供大家参考。比如很多书籍对于PID,只讲了计算,但是最后计算出来的值如何应用,则完全不讲,当时我是一头雾水,后来搞明白以后又觉得还是很简单的,但如果书籍里面能提一下,那不是让人学习起来容易很多么。PID就是比例,积分,微分三个单词的首字母缩写,是工程上控制系统中的一个常用控制算法。以下结合我之
我的PID学习历程—-PID位置式和增量式 文章目录 起因一、什么是开环系统?二、什么是PID?KP,KI,KD三个参数的作用三、PID算法的离散化1、什么是位置式PID?2、位置式PID实现3、什么是增量式PID?4、增量式PID实现四、采用VOFA+调试PIDfirewater协议格式justfloat协议格式五、目前六、后面一段时间七、参考代码 起因 前一篇文章实现了使用TB6612
本文主要列出了用于移动机器人的常见的运动规划算法. 只是列出了简单的名称, 详细细节需要后面仔细学习. 按类别可以分为基于搜索的路径规划, 基于采样的路径规划,动力学约束下的路径规划,基于马尔可夫决策过程的运动规划。 1基于搜索的路径规划SEARCH-BASED PATH FINDING 基于图搜索的路径规划方法主要有Dijkstra , A*算法 和, JPS算法 (Jump Poi
本文整理了自抗扰控制ADRC的由来及其原理,主要参考韩京清老师《自抗扰控制技术》。 PID控制: PID(Proportional-Integral-Derivative)控制是一种常见的反馈控制算法,被广泛应用于工业过程控制和自动化系统中。虽然PID控制具有很多优点,但也存在一些缺点,包括以下几点[参考自抗扰控制技术]: 1.直接以e=v-y的方式产生原始误差不太合理,这里控制目标v是
0. 简介 对于自动驾驶以及机器人而言,除了SLAM以外,另一个比较重要的部分就是轨迹规划了。而最近作者看到了几篇比较好的文章,分别为《A Review of Motion Planning Techniques for Automated Vehicle》、《A review of motion planning algorithms for intelligent robots》、《A re
轨迹时间同步—时间缩放法 摘要 一般而言,多轴机器人的任务一般是通过控制末端工具的位置和姿态来完成,会涉及位置和姿态两个量 , 所以在轨迹规划时需要考虑二者的时间同步 ,即在同一规划时间内机器人末端要满 足轨迹的位置 和姿态的联动,这就对控制算法提出了更高的要求。由于驱动系统饱和限制或任务要求,对机器人的运动速度和加速度有一定的约束。为了分别满足位置和姿态的速度、加速度幅值约束,往往需要分别对
第三方账号登入
看不清?点击更换




















第三方账号登入
QQ 微博 微信