控制器设计篇 前面介绍了利用matlab实现系统的模型辨识,本篇将在运动学模型的基础上,采用Matlab工具箱进行位置控制器的设计,并在仿真环境中进行了实验验证,所采用的控制器设计流程也适用于其他控制对象,简要设计流程如下 数据采集:本文旨在进行位置控制。在完成无人机速度环和姿态环的基础上,输入激励信号,以尽可能引发被控对象的特性。可以通过三角函数叠加的方式进行激励信号的输入。同时,确定期望速
模型辨识篇 在实际的无人机系统中,控制器的设计至关重要,它直接影响无人机的稳定性和响应能力。然而,要设计出高效、可靠的控制器,首先必须准确理解无人机的动态行为,这就需要通过收集输入输出数据来辨识其运动学模型。运动学模型是描述无人机在空间中运动规律的数学模型,它通常包含了无人机的位置、速度、加速度以及与之相关的控制输入等参数。通过辨识运动学模型,能够理解无人机在受到不同控制输入时的响应方式,这对
0. 简介 现在的机器人领域在普遍使用IMU(惯性导航单元)。该系统有三个加速度传感器与三个角速度传感器(陀螺)组成,加速度计用来感受飞机相对于地垂线的加速度分量,陀螺仪用来感知飞机的角速率变化;通过算法融合来计算出飞行器姿态,也用来进行航位推算。而每次我们拿到一个惯性导航的时候会发现参数手册中有很多信息,而这些信息的好坏要怎么评判是比较关键的。下面我们来一一讲解。 1. 最大零点偏移 1.1 含
上一篇介绍了Tello无人机仿真环境中的飞行控制,本篇将介绍tello无人机在物理系统中的轨迹跟踪,实现实物无人机的速度控制。本文采用的无人机为Tello TT,TELLO Talent由飞行器和拓展配件两部分组成。飞行器配备视觉定位系统,并集成飞控系统,能稳定悬停、飞行。可显示高清画面,并可实现拍照、录影、弹跳、全向翻滚以及一键飞行等功能。Tello相机可拍摄500万像素照片与720ρ高清视频
【Tello无人机】Tello飞行控制 上一篇介绍了Tello无人机的仿真环境搭建,本篇将介绍tello无人机在pybullet环境中的飞行控制,实现无人机的速度控制。本环境最终要实现强化学习算法下的飞行任务,故采用通用的gym接口进行环境搭建。 Gym环境接口 OpenAI Gym 包含许多有趣的环境,从具有经典控制任务的环境到可让你训练智能体玩 Atari 游戏的环境。但本文是想自己定义一
1.考虑道路倾角及曲率影响道路倾角与曲率对无人驾驶车辆的操纵稳定性有着重要影响直接关系到车辆动力学模型的准确程度 结合《车辆运动控制(6)考虑侧倾约束》得到的综合考虑横摆、侧滑和侧候约束的车辆动力学模型建立考虑道路倾角及曲率影响的车辆动力学模型,如图所示:考虑侧倾约束的车辆动力学模型跟踪时变曲率参考道路的跟踪误差方程可由式(11)得到考虑存在道路倾角中的情况如图:车辆质心处受到的合力在y轴上的分力
1.简介前两节介绍的车辆模型 未能考虑车辆的操纵稳定性,或者说只能体现车辆横摆稳定性鉴于无人驾驶车辆的操纵稳定性需要综合考虑车辆的 横摆稳定性 和 侧倾稳定性因此建立 横摆、侧滑和侧倾综合等效约束 的车辆动力学模型十分重要 2.模型受力分析考虑车辆的侧倾运动,建立横摆、侧滑和侧倾综合等效约束的车辆动力学模型受力分析如图:根据牛顿第二定律,分别得到车辆沿 y轴的受力平衡方程以及车辆绕 z轴和 x轴的
1. 进一步简化 点质量车辆动力学模型忽略了车辆的尺寸信息以及由横、纵向加速度引起的载荷转移用一个带质量的点来描述车辆运动,是对车辆单轨模型的进一步简化通常用于无人驾驶车辆的路径规划阶段,可以有效地降低轨迹规划的计算量 点质量车辆动力学模型在惯性坐标系中的运动方程和受力平衡可以表示为: 其中,车辆在纵向上受到阻力的合力F_{dissp} = ma_d 2. 摩擦圆约束 对于无人驾驶车辆点质量
1.车辆横摆动力学模型简化车辆横摆动力学模型是无人驾驶车辆路径跟踪控制中常用的模型之一但是在 《车辆运动控制(2)车辆横摆动力学建模》 中根据单轨模型分析得到2自由度的车辆横摆动力学微分方程:对于模型预测控制器的设计来说还是过于复杂,因此需要对其进行进一步简化 1.1 小角度假设此时,式(21) 所表示的车辆动力学模型的非线性特征主要来自轮胎非线性区的轮胎力表达可以使用《车辆运动控制(3)轮胎模型
1. 简介 在 《车辆运动控制(2)车辆横摆动力学建模》 中根据单轨模型分析得到2自由度的车辆横摆动力学微分方程: 其中,F_{yf},F_{yr}车辆前、后轴上轮胎侧向力的合力还需要进一步通计算而得 在车辆的运动过程中轮胎所受的纵向力、侧向力、垂直力及回正力矩对汽车的操纵稳定性和安全性起着重要作用由于轮胎结构复杂,动力学性能呈非线性选择符合实际又便于使用的轮胎模型是建立车辆动力学模型的关键
1.简介车辆运动规划与控制需要通过对车辆运动学或者动力学系统的控制来实现如果规划阶段能够考虑车辆 运动学和动力学约束,那么运动跟踪控制性能会更好 车辆在地面运动的动力学过程是非常复杂的,为了尽量准确描述车辆运动,需要建立复杂的微分方程组,并用多个状态变量来描述其运动 用于模型预测控制的模型只要能够表现出车辆运动学与动力学约束,就可以使模型预测控制器实现预定控制目的特别是在规划阶段,为了保证规划算法
1. 简介 车辆整车动力学模型一般包括用于分析: 车辆 平顺性 的 质量-弹簧-阻尼模型 车辆 操纵稳定性 的 车辆-轮胎模型两者研究的侧重点不同平顺性分析的重点是车辆的悬架特性而车辆操纵稳定性分析的重点是车辆纵向及侧向动力学特性 主要研究目标是使 车辆快速而稳定地跟踪期望路径,属于车辆操纵稳定性问题因此对于悬架特性不做深人探究 2. 假设条件 这里所建立的动力学模型主要是作为模型预测控制
PID控制器模拟器 概述: PID控制器是一种常用的反馈控制算法,用于实现系统输出与期望值之间的精确调节。PID控制器模拟器是一个工具,可以模拟和测试PID控制器的性能,并对系统进行调整和优化。 输入参数: setpoint:期望值或目标值 process_variable:过程变量或实际测量值 Kp:比例增益系数,用于调整控制器对误差的响应程度 Ki:积分增益系数,用于修正系统静态误差 K
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM) PMSM具有高效率、高功率密度和快速响应等特点,在现代工业中得到了广泛应用。而矢量控制是一种广泛应用于永磁同步电机的高精度控制方法,它能够实现永磁同步电机的快速、准确、稳定的运行。 矢量控制 矢量控制的核心思想是将电机转子空间矢量分解为两个直角坐标轴上的分量:磁场方向分量和转子电动势方向分量,
波特图(Bode Plot)是一种用于描述线性控制系统频率响应的图形表示方法,通常用于分析和设计控制系统。它以控制系统的传递函数(或频域传递函数)为基础,将系统的幅频特性(振幅-频率响应)和相频特性(相位-频率响应)以图形的方式展示出来。可以根据波特图理解和评估系统的稳定性、性能和鲁棒性。 波特图可以指导控制器的设计。通过调整控制器的参数,可以改变系统的频率响应,以满足特定的性能要求。波特图提供了
原理概述 步进电机是一种数字信号驱动的电机,其主要优点之一就是拥有很好的开环控制能力,控制系统不需要传感器和相应电路的反馈电机信息,在负载不超载和脉冲频率合适的情况下,步进电机接收到的脉冲数和转子的角位移就是严格成正比关系。虽然步进电机可以很好的开环控制,但实际在一些开环系统中,步进电机有可能由于自身性能及系统机械结构等因素的影响,在快速启停或负载突变时出现失步、过冲甚至堵转,控制器无法知晓和
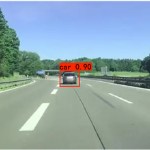
0. 简介 作为局部规划器而言,当机器人或无人机想要避开动态障碍物时。局部规划器就显得尤为重要了。其中基于梯度的规划器被广泛用于四旋翼无人机的局部规划,其中欧几里得符号距离场(ESDF)对于评估梯度幅度和方向至关重要。然而,由于轨迹优化过程仅覆盖了ESDF更新范围的一个非常有限的子空间,因此计算这样一个场具有很大的冗余性。《EGO-Planner: An ESDF-free Gradient-b
有6轴单独控制,运动控制时还会涉及到大量运算,图方便采用底板+主控板+6个子板的方式来实现。主板上的处理器进行总体控制,包括:液晶屏,通讯,定位,任务分配等,每个子板实现每个电机的轨迹运算,动作控制,并与主板通讯。与电脑的通讯,采用CAN总线方式,可靠,性能也好些。子板驱动电机,用脉冲+方向的方式实现。第2版由于用到伺服电机,还涉及到位置采集,将会留485和CAN接口,本来是准备用CAN的,但很多
FOC(Field-Oriented Control,磁场定向控制)是一种电机控制策略,又称矢量控制,是通过控制变频器输出电压的幅值和频率控制三相直流无刷电机的一种变频驱动控制方法。FOC 的实质是运用坐标变换将三相静止坐标系下的电机相电流转换到相对于转子磁极轴线静止的旋转坐标系上,通过控制旋转坐标系下的矢量大小和方向达到控制电机目的。 无刷电机 直流有刷电机指的是电机工作的时候,线圈和转换器
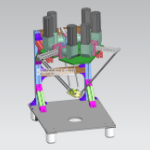
6轴并联机器人开发–有限元分析 对我的正式版并联机器人做了一个有限元分析,并根据计算结果对相应位置做了一下补强。在负荷50公斤时,承力件最大变形为0.013mm,满足要求。由于机器人运动时,最大加速度不超过10米/秒秒,即1G,而负荷也只有3~5公斤,加上所有运动系统也不会超过10公斤,所以变形仅为计算值的1/5,约为0.0026mm。 最终机械设计如下 顺便说一下,用的是UG NX20
第三方账号登入
看不清?点击更换

















第三方账号登入
QQ 微博 微信