navigator模块主要用于导航控制。即根据设定的飞行任务/轨迹,在每个时刻给出需要实现的目标位置/速度,交由下一级的pos_control来实现。navigator在对应的模块目录下的navigator.cpp中实现,主要函数为Navigator::run(),如下其中首先进行一系列的初始化,然后进入while工作循环,工作循环按照一定的频率运行,执行导航功能。在每一个工作循环根据命令设定
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器【ROS&GAZEBO】多旋
@TOC测试平台: Windows 10 测试对象:PyBullet 机器人仿真环境 测试时间:2022年5月26日 1 问题描述 在进行 PyBullet 学习时,首先遇到的第一个官方的案例就是导入地面模型与 r2d2 的机器人模型仿真一段时间,仿真演示了模型的导入以及 r2d2 机器人从高度为 1 米的空中坠落。 在进行上述仿真时,不难发现有些人在运行上述案例时,会发现机
有了前面机器人动力学建模(机器人动力学方程的四种形式)和最小惯性参数集(机器人最小惯性参数集)的基础,明白了离散系统辨识与连续系统辨识的区别,接下来我们就可以开始做动力学参数辨识的工作了。 采用的方法是大家最熟悉的最小二乘法:通过采集N组数据,记录关节位置与力矩,带入到基于最小惯性参数集的动力学方程中,由于Yr'*Yr是满秩的,即可以算出动力学参数向量pr 动力学参数辨识的算法看起来是很容
1.前言 机器人传统的位置控制主要还是基于三环PID反馈控制来实现的。这种策略的优势是操作员不需要对系统进行建模,仅通过参数调节即可获取优异的位置追踪响应性能,且PID控制器鲁棒性好,抗干扰能力强。因此目前这种三环串级式PID控制器成为机器人乃至整个自动化领域的主流选择。遗憾的事,我们无法从理论上严格证明PID控制器的稳定性,只是它好用,所以我们一直用它。 2.动力学前馈 控制理论本
问渠那得清如许 四大机器人公司(发那科,ABB,安川和库卡)的服务对象集中在工业界。他们生产的机器人往往都是庞然大物,锋芒毕露,让人远观而心畏,更别说近距离去接触它们。而工厂中机器伤人的事件也屡见不鲜。原因主要在于这类机器人一般是基于位置控制,它们严格按照预定的轨迹去运行,当人主动或被动地去改变它们的运动时,结果只是以卵击石,自讨苦吃。它们蛮如野牛,人们也避之唯恐不及。
路径规划算法学习Day2-栅格法创建环境地图 前言 一、栅格法 1、原理 二、栅格法matlab实现 1.创建地图 2.完整代码 3.所生成地图 三、总结 前言 静态环境中机器人全局路径规划一直是路径规划中的一个重要问题,具有广阔的应用范围。用于全局路径规划的典型方法有可视图法、自由空间法和单元分解法等。栅格法和单元树
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器【ROS&GAZEBO】
1. 背景介绍 在之前的文章中,我们讨论力检测及力控制的一些方法,其中我们也着重讨论了通过电流环进行力控制的局限性。而力控制目前主流的方案是在机械臂末端安装多轴力矩传感器,如下图所示: 通用的是六轴力矩传感器,它可以同时测量出三方向的力与三方向的扭矩。厂家会给用户一个解耦矩阵,用于获取独立的六维力/力矩信息。 一般的,力矩传感器后会有一些末端执行器,比如夹爪等,这些负载会干扰传感
前言 接着上篇6D姿态估计算法汇总(上),原文请见6D姿态估计算法汇总(下) 10、PoseNet: A Convolutional Network for Real-Time 6-DOF Camera Relocalization 论文链接:https://arxiv.org/abs/1505.07427代码链接:http://mi.eng.cam.ac.uk/projects/reloc
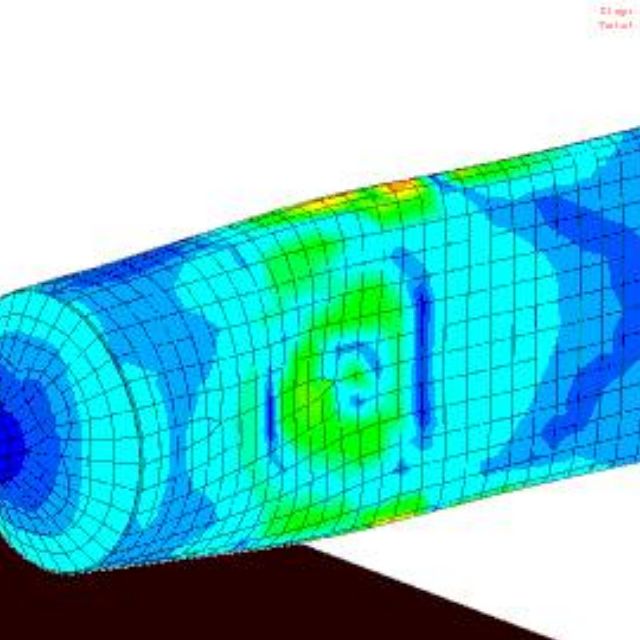
之前咱这面都是用的Fluent2019版本做的服务器性能测试。最近那个盘让我重做系统了,后来学生给帮忙装的Fluent2020版本。因为有客户需要做验收报告,要附上性能测试报告。于是我就用Fluent2020重新跑了一下。然后就发现了问题。 Fluent2020版本竟然比Fluent2019版本快了10秒! Fluentl流体工程仿真计算实例与应用相同的算例啊。之前我们测试DM
1.背景介绍 机械臂的位置控制是机械臂最重要的功能。机械臂的位置控制精度也是研究者及工程师一直关注的问题。本文梳理下机械臂位置控制的一些发展脉络,帮助大家提高对其的认识以及如何去提升机械臂的位置控制性能。 精度衡量:直接测量机械臂末端的位置比较困难,这里采用一种近似的方式,比较机械臂各轴指令角度与实际编码器反馈角度间的偏差值。 2.控制策略 三环反馈伺服控制 这种位置控制方式
第九章、模型替换以及TEB调参技巧 1、前言 上节内容让小车在gazebo仿真环境中实现导航,本节内容重点介绍一下gazebo仿真中的模型替换方法以及TEB调参的技巧。 2、模型替换 阿克曼小车项目从第四章开始完全使用的是自己写的模型,当然,用方块与圆柱构建的小车看上去自然不会太过于美观,那是否可以
1、前言 上一节通过配置小车的里程计,用gmapping算法建了房间的二维栅格地图;这一节通过配置AMCL定位以及move_base实现小车在房间中的自主导航。在mini小车仿真的章节讲到导航主要分为机器人定位和路径规划两大部分。ROS分别提供了功能包 1、move_base:实现机器人导航中的最优路径规划。 2、amcl:实现二维地图中的机器人定位。
从2020年3月份到现在,一年的时间里断断续续自学最优化,结合豆瓣读书、知乎等网站上的推荐,翻阅了以下书和课程: Stephen Boyd和Lieven Vandenberghe的《Convex Optimization》,这本书被公认为学习凸优化的必读经典著作,其中大量的篇幅讲应用,讲理论和算法的篇幅稍少一些。在B网站上有Boyd的视频课程,油管上也有,不过只有英文字幕,如果是零基础接触,直接
前言 本文首发于公众号【3D视觉工坊】,原文请见6D姿态估计算法汇总(上),更多干货获取请关注公众号~ 1、DenseFusion: 6D Object Pose Estimation by Iterative Dense Fusion (CVPR2019) 原文链接:https://arxiv.org/abs/1901.04780代码链接:https://github.com/j96w/D
KKT条件是约束优化问题最优解的一阶必要条件,证明角度有很多,比较容易看懂的是从约束条件梯度线性无关角度出发的证明,下面进行分析。约束优化问题的一般形式可写为
一、下载安装插件 插件名称:sw2urdfSetup 下载地址:https://github.com/ros/solidworks_urdf_exporter/releases/tag/1.6.0 下载后直接安装即可。安装成功后,可在SolidWorks的菜单栏中看到:工具—Tools—Export as URDF 二、导出模型步骤1:打开已经构建好的装配图文件,并保证模型为初始位置。
第三方账号登入
看不清?点击更换




















第三方账号登入
QQ 微博 微信