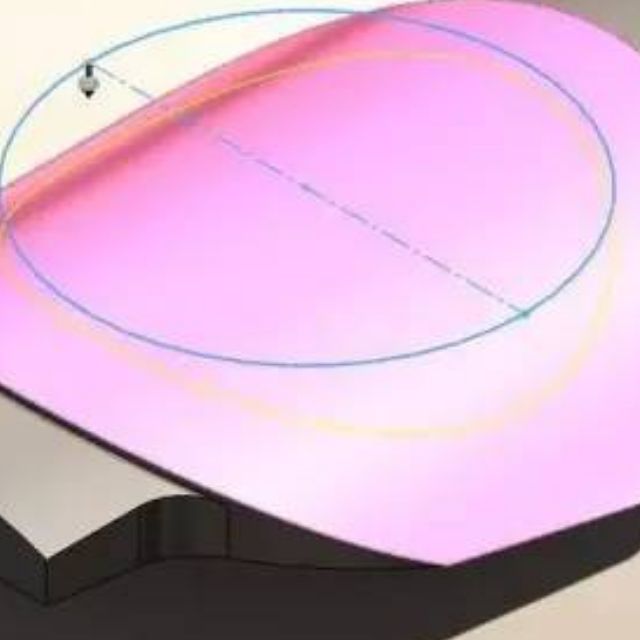
在ANSYS应用程序中,可以将关键的仿真特性定义为参数(Parameters)。然后在Workbench中参数管理(Parameter Set)界面下管理参数,通过参数化驱动,实现快速更改仿真模型几何及拓扑参数、材料参数、网格参数、边界条件等设置,用来研究和优化不同设计方案下产品性能。 ANSYS中仿真参数化 参数可以在用于结构
本文主要介绍如何将CoppeliaSim与Python联合起来进行仿真, 针对于他们直接的联合控制进行配置。 一、The B0-based remote API 这是官方对两个API的说明: 链接:https://www.coppeliarobotics.com/helpFiles/en/remoteApiOverview.htm 基于B0的远程API:这表示远程API的第二
Delta机器人:运动学正反解分析 一、Delta机构简介 Delta机构是并联机构中的一种典型机构,起原始结构如图1所示。Delta机构由R.Clavel 博士在 1985年发明,是现在并联机器人中使用最多的一种,具备了并联机构所特有的优点,负载能力强、效率高、末端执行器精度高、运动惯性小,可以高速稳定运动等。因此在机器人领域获得了越来越广泛的应用。以实现高速、精准、高效的运动。 图1
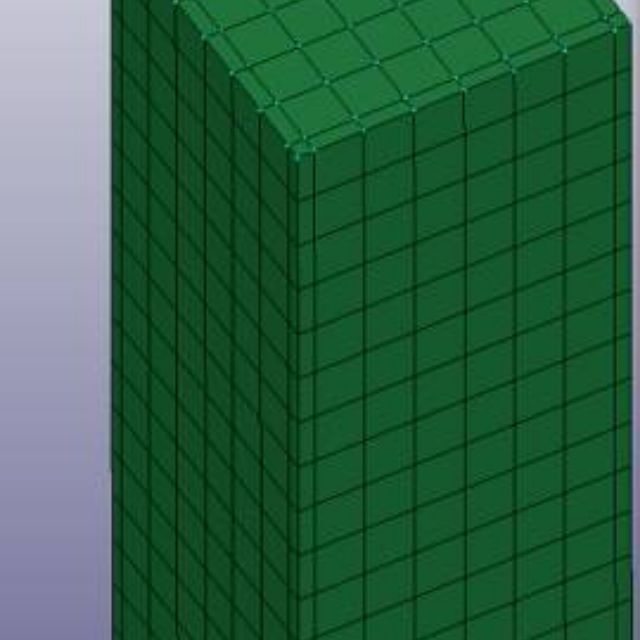
下面是有关ANSYS分析中的单元选择方法: 一、单元类型选择概述: ANSYS的单元库提供了100多种单元类型,单元类型选择的工作就是将单元的选择范围缩小到少数几个单元上; 单元类型选择方法: 1.设定物理场过滤菜单,将单元全集缩小到该物理场涉及的单元; 二、单元类型选择方法 2.根据模型的几何形状选定单元的大类,如线性结构则只能用“Plane、Shell”这种单元去模拟; 3.根据
https://blog.csdn.net/weixin_42887138/article/details/115080567 https://blog.csdn.net/weixin_42887138/article/details/115080567 代码百度云链接:https://pan.baid
如何准确预报各种工程结构中所用材料的强度是保证各种工程结构安全的关键。500多年来,力学等多学科的科学工作者持续不断地开展了大量有价值的研究工作。然而,到目前为止,由于问题的复杂性,所建立的强度模型和预报理论主要还是基于前人所建立的公设和大量数据所归纳的经验公式。因此,许多学者也把材料破坏的预报问题归纳为固体力学的终极问题之一。 最新的一项研究尝试了把材料强度的预报问题纳入理性的非平衡态热力学的
CoppeliaSim软件下载:https://www.coppeliarobotics.com/downloadsCoppeliaSim用户手册:https://www.coppeliarobotics.com/helpFiles/index.htmlBubbleRob Tutorial:https://www.coppeliarobotics.com/helpFiles/en/bubbleRo
滑模教程DR_CAN滑模教学 function [sys,x0,str,ts,simStateCompliance] = sfuntmpl(t,x,u,flag)switch flag, %%%%%%%%%%%%%%%%%% % Initialization % %%%%%%%%%%%%%%%%%% case 0, [sys,x0,str,ts,simSta
上文中我们提到了机器人动力学方程的四种形式,其中的第四种(最小惯性参数集)形式对于机器人的系统辨识及控制尤其重要。 对于一根杆件,共需如下十个经典参数描述它的质量分布情况:惯性张量矩阵,如下所示,共有六个参数 质量M 三维质心(X,Y,Z),一般我们会把质量乘上质心,组成一个最终的三个惯性参数(MX,MY,MZ),这么做的原因在于动力学中的重力矩一般包含质量乘质心这一项。
1前言振动在多种场合是有害的。比如传动减速机的振动、抽风机的振动、驱动电动机的振动等,这些振动轻者影响设备的使用性能和使用寿命,重者造成重大设备事故。另一方面振动有时又是可以利用的。比如振动给料机、振动筛分设备,两者均是利用振动原理达到某种工艺需求的振动筛分机械。 振动筛分机械是改革开放以来得到迅速发展的一种新型机械,目前已广泛用于采矿、冶金、
一.标量、矢量和张量 标量 Scalar - heat and mass are scalars 只具有数值大小(magnitude),而没有方向(direction)的量,称为“标量”。例如,质量、密度、温度、速率、体积、时间和热量等物理量。无论选取什么坐标系,标量的数值恒保持不变。标量间的运算遵循一般的代数法则。 矢量 Vector - Heat and mass fluxes
1 背景介绍 UR在每个关节里都是采用单圈绝对值编码器与多圈增量式编码器混合工作的方式。关于此双编码器的用途,UR官方没有说明,网上目前推测的用途包含两个: 绝对值型的用来找零点,增量式用来做控制;实际中可能会把增量式的反馈值接入到位置环,而绝对值的接入到速度环。 通过两个编码器的误差值可间接获取关节输出力矩,也即把双编码器当做关节力矩传感器来用。 功能1的争议不大,国内很多家
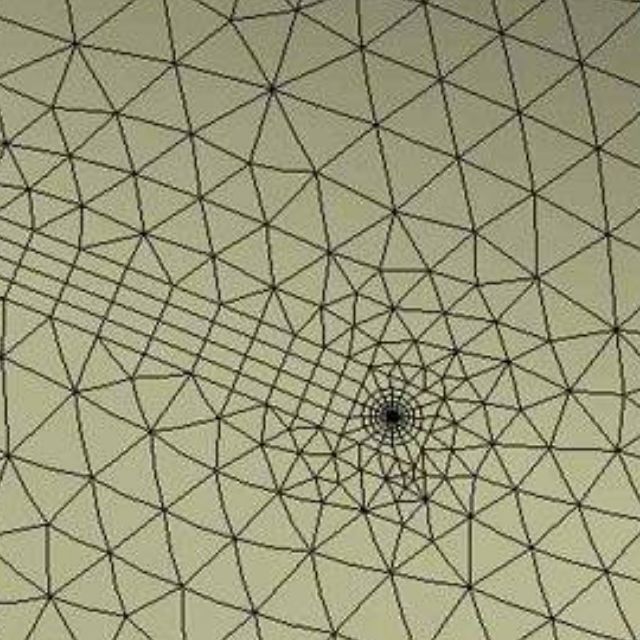
目前,自己通过调用opencv的相关接口,想实现一个比较裸的SLAM系统,但是发现opencv在特征提取上的能力着实达不到slam的要求。 可以看到左边的opencv orb算法特征点比较集中扎堆,右边的分布均匀,这样自然,有用的特征点数量也就越多。生扒了ORBSLAM2的实现,果然,没有好的特征,在高效的算法都是徒劳的。这里就顺便整理记录下ORBSLAM2的特征提取实现过程。 流程图
Fourier Transform 是一套关于车辆轨道系统方面的振动后处理软件,用于时域转换为频域(含1/3倍频程,后续将加入功率谱密度模块功能)。Fourier Transform 2.0不仅能适用于轨道车辆专业领域,同样适用于其他行业有关信号方面的转换。本软件旨在解决通过各种软件计算出来的时域数据转换成频域数据转换不对,或者不会转换的情况。 接下来介绍本软件的使用方法并展示使用效果。 首先
研究舰船水下爆炸的破坏效应对于提高舰船的生命力和战斗力具有非常重要的工程应用价值。 药包在水中爆炸后首先产生冲击波,冲击波的压力波峰以指数的形式衰减;同时,炸药变成高压的气体爆炸生成物,气泡在周围水介质的作用下,膨胀和压缩,产生滞后流和一次或多次脉动压力;冲击波到达自由面后,在一定的水域内产生很多空泡层,当上层的表面水层在大气压力和重力的作用下下落时,由于比其下层的空泡层的加速度大,便与空泡层相
第六章、配置controller并用键盘控制节点让小车动起来 1 、前 言 上一节用xacro对urdf文件进行一个优化,并且配置好小车gazebo仿真所需的插件,以及传感器的插件。这一节通过配置controller让小车能够在gazebo仿真环境中真正动起来,并且能够用键盘控制节点来做一个控制。 2、 配置racebot_co
在非线性运动的状态估计中,会有两点影响我们对贝叶斯滤波的使用: 1.我们一般对于运动或测量的噪声都使用的是简单的加性噪声 但是在非线性情况下,往往也会对噪声造成影响,通常是这样的 2.我们通常所处理的那些高斯分布的噪声或状态值的分布会在非线性的环境下,也变成非高斯的,如下图: 这样就不在符合贝叶斯滤波的条件了,自然也就无法使用贝叶斯滤波估计状态了。解决办法就是我们通
伯努利原理 伯努利原理(又称伯努利定律)是流体力学中的一个定律,由瑞士流体物理学家丹尼尔·伯努利于1726年提出。它是水力学所采用的基本原理,即:动能+重力势能+压力势能=常数。其最著名的推论为:等高流动时,流速大,压力就小。它仅适用于粘度可以忽略、不可被压缩的理想流体。 真实事件 1912年秋天,远洋巨轮“奥林匹克”号, 正在波浪滔滔的大海中航行着。很不凑巧,离“奥林匹克”号100米左
之前写过一些关于KF和EKF的使用文章,主要偏向于应用,而且过于工程化。鉴于不断的理解深入学习,对于这块知识也有了更进一步的理解认识,这里通过实际Radar数据,详细记录下对于EKF的认识。 在介绍EKF之前,先要认识它的爸爸,贝叶斯滤波。 贝叶斯滤波 贝叶斯滤波的基础是马尔科夫性:当一个随机过程在给定现在状态以及所有过去状态的情况下,其未来的状态的条件概率分布仅依赖于当前状态;换句话说
本文作者:王勇21633012 转载请保留此信息 原文链接:https://blog.csdn.net/weixin_38275649/article/details/80945601 0.首先,声明一些相关的定义 所有坐标系均使用标准的右手笛卡尔坐标系(基的模为1,坐标轴两两正交). 下标"1","2"分别代表相机-深度坐标系、相机-色彩坐标系的量,世界坐标系下的量无下标,下标"21"
第三方账号登入
看不清?点击更换





















第三方账号登入
QQ 微博 微信