#挑战Open AI!马斯克宣布成立xAI,你怎么看?#文章目录 前言 33.3.1 嵌入在集体PPM/总信号通道中的RSSI 33.3.2 模拟电压型RSSI被输送到一个专用引脚 33.3.3 PWM类型的RSSI输送到一个专用引脚 前言 以下是典型的 RC 接收机 RSSI 连接方案示例: 33.3.1 嵌入在集体PPM/总信号通道中的RSSI 通常的做法是在一根信
Py2neo:一种快速导入百万数据到Neo4j的方式 Py2neo是一个可以和Neo4j图数据库进行交互的python包。虽然py2neo操作简单方便,但是当节点和关系达几十上百万时,直接创建和导入节点、关系的方式会越来越耗时。本文提供一个py2neo小技巧,通过简单的代码,能够以每秒1万节点/关系的速度快速将数据导入Neo4j。 本文目录 Py2neo:一种快速导入百万数据到Neo
1.简介 以下是本人总结的一些知识点,如果想看官方文档这:反应式堆栈上的 Web (spring.io) Spring WebFlux是随Spring 5推出的是一个响应式编程和异步非阻塞的Web开发框架, 它与Spring MVC不同,它不需要Servlet API,完全异步和非阻塞,以Reactor为基础实现响应式编程。 1.1异步编程与同步编程的区别? 了解Spring W
起因 自己半个月之前学习了makefile,编译c/c++程序方便很多而最近又正好使用到了Linux系统,Linux系统不像Windows系统一样,基本上都是命令行编程一个文件还好说,可是多个文件一起编译,就会很麻烦,甚至浪费时间这个时候makefile管理项目就很方便了,明白其原理后,一旦需要使用,写好模板后,可以直接移植,而且我发现,这个适合于Linux平台,也适合于Windows平台。而且
1 关于gallery和probe的介绍 在人脸识别中评价指标中仅仅通过准确率是无法评价一个模型性能的,因为准确率无法体现出人脸识别中最重要的指标通过率和拒绝率(参考),而通过率、拒绝率的计算就会设计到gallery和probe的概念,往下继续看吧。 1、首先来看下单词的意思:gallery:画廊probe:探针、调查 2、下面从具体使用gallery和probe的场景介绍什么着两个东西具体
最近在研究windows系统上部署安装目标检测算法,需要用到OpenCV软件,因为OpenCV可能是目前使用最广泛的开源图像处理工具了,尤其是在科研领域。于是,本篇博客主要详细记录一下如何在Windows 操作系统下,搭建Visual Studio 2022+OpenCV4.5.5+OpenCV contrib4.5.5的运行环境。1. 安装visual studio安装Visual Studio
文章目录 1、背景 2、数据获取 3、文本分析与可视化 3.1 短评数据预处理 3.2 词云图可视化 3.3 top关键词共现矩阵网络 3.4 《狂飙》演职员图谱构建 4、短评相关数据分析与可视化 5、总结 原文请关注:实用自然语言处理 作者:风兮 建议查看原文: https://mp.weixin.qq.com/s/nURcYK
#电脑城逐渐衰退甚至消失,是好是坏?# 文章目录 33.4.1 将非标准的PWM型RSSI转换为模拟电压 33.4.2 如何利用Futaba S.BUS2的"帧错误率"信息来作为自动驾驶仪的RSSI使用 33.4.3 如何设置硬件 33.4.4 如何设置RSSI反馈到你的Futaba FASSTest遥测功能发射机上 33.4.1 将非标准的PWM型RSSI转换为模拟电压 对于非标准
文章目录 前言 36.1 RPM库如何工作(TYPE = AUXPIN) 36.2 霍尔效应传感器 36.3 电调遥测 - 电机平均转速 36.4 电气换向传感器 36.5 光学传感器 36.6 谐波陷波中心频率 前言 ArduPilot 支持使用众多类型的转速传感器。它们通常用于传统的直升机,测量主旋翼速度和电机/发动机转速。对于那些希望使用直升机闭环油门调
#抢先测试!文心千帆大模型平台开放申请# 文章目录 前言 20.1 你将需要什么 20.2 校准 20.3 用任务规划器进行设置 20.4 飞行前测试控制装置 20.5 测试失控保护 20.6 减少控制的滞后性 前言 本文解释了如何用操纵杆或游戏手柄控制你的飞行器,使用任务计划器向飞行器发送"RC Override"消息。 其他 GCS 也可能支持"RC
大信 ALSET (QQ:8125036) 感谢地平线科技给予的RDK X3Module开发板试用机会。地平线RDK X3 Module开发板是由X3 核心模块和底板组成。其核心模块就是RDK X3 Module模块。RDK X3 Module的全称是Horizon Robotics Developer Kit X3 Module,其搭载了地平线旭日3系列高性能的智能芯片,具备
文章目录 1、文本数据获取 2、常规文本数据预处理 2.1 将文本数据清洗干净 2.2 将文本数据格式化 3、任务相关的文本数据预处理 3.1 不平衡问题 3.2 数据增强问题 3.3 数据标注问题 4、一些可用的文本预处理工具 5、总结 本文关键词: 文本数据预处理、中文文本预处理、自然语言处理 摘要
本文参考如下文章: 1. ESP8266 建立Linux開發環境 2. Win10 Bash搭建ESP8266编译环境(RTOS SDK) Note:工具链是直接下载的,无需编译 最近重装win系统,然后按照我以前写的博文重新搭建ESP8266编译环境 https://blog.csdn.net/toopoo/article/details/80528536 但是发现如果直接运行Ecli
#分享那个在你收藏夹里“积灰”的好东西# 文章目录 前言 34.1 装有IOMCU的自动驾驶仪上的继电器引脚 34.2 通过任务规划器定义继电器引脚 34.3 飞行员控制继电器 34.4 任务控制继电器 34.5 任务规划器控制继电器 前言 "继电器"是自动驾驶仪上的一个数字输出引脚,可在 0V 和 3.3V 或 5V 之间切换,具体取决于自动驾驶仪。与伺服类似,
ROS学习笔记(2):package相关命令 目录 2 package相关命令 2.1 rospack 2.2 roscd 2.3 rosls 2.4 rosdep 3 Metapackage 2 package相关命令 2.1 rospack rospack是对package管理的工具,命令的用法如下: rospack help 显示rospack的用法 rospac
文章目录 Anaconda3 vscode geek chrome everything 向日葵远程软件 Anaconda3 anaconda3用于有效管理python函数库 在anaconda3官网下载安装包 双击打开Anaconda安装包,我选择仅为当前用户安装,这里看个人选择,选为所有用户安装需要额外管理员权限。 设置
如何构建基于ROS的自主建图和导航机器人 ROS已经提供了建图,导航,定位等一系列功能包,如何基于ROS构建一个移动机器人呢? ROS的官方文档已经有非常详细的说明,可以参见 http://wiki.ros.org/navigation/Tutorials/RobotSetup。 但是,对于刚入门的新人,还是有一些难懂。 本文将在这里做一个概要性的总结。 基于具体的机器人需求,假设我们只使用
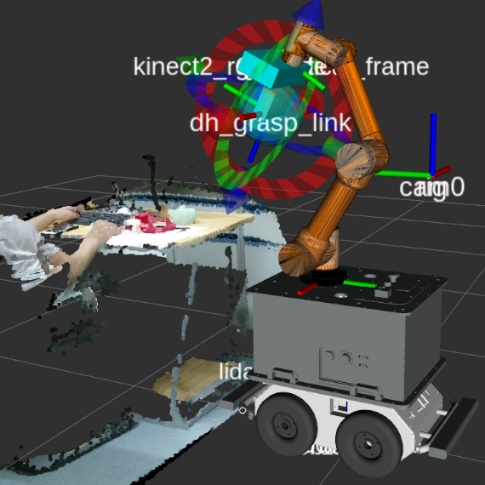
目录 6 TF 6.1 TF/TF tree格式规范 6.2 TF相关工具命令 6.3 TF原理 6.3.1 ROS坐标系 6.3.2 坐标系分类 6.3.3 setup Robot TF 6 TF TF是ROS里的一个基本的也是很重要的概念, TF(TransForm),就是坐标转换. tf本质是树状的数据结构,所以我们通常称之为"tf tree", tf也可以看成是一
1、用conda创建Python虚拟环境(在conda prompt环境下完成) conda create -n environment_name python=X.X (注:该命令只适用于Windows环境;“environment_name”是要创建的环境名;“python=X.X”是选择的Python版本) 2、激活虚拟环境(在conda prompt环境下完成) conda a
生产者消费者问题这是一个非常经典的多线程题目,题目大意如下:有一个生产者在生产产品,这些产品将提供给若干个消费者去消费,为了使生产者和消费者能并发执行,在两者之间设置一个有多个缓冲区的缓冲池,生产者将它生产的产品放入一个缓冲区中,消费者可以从缓冲区中取走产品进行消费,所有生产者和消费者都是异步方式运行的,但它们必须保持同步,即不允许消费者到一个空的缓冲区中取产品,也不允许生产者向一个已经装满产品且
第三方账号登入
看不清?点击更换













")







第三方账号登入
QQ 微博 微信