【FastBond2阶段1——基于ESP32C3开发的简易IO调试设备】 1. 功能介绍 2. 主要元器件介绍 2.3.1 WS2812: 2.3.2 90舵机: 2.3.3 SSD1306: 2.2.1 旋转编码器: 2.2.2 模拟ADC: 2.2.3 GPIO接口: 2.1 主控板:CORE ESP
一、前言 一般来说使用IO作为设备的按键输入就够用了 ,但是我就是想实现制作的按键键盘就像按实际键盘的某些按键一样,这样在上位机处理就容易很多,直接调用键盘类函数就可以了。 而且自己根据需求可以自定义按键数量,按键功能,我这里制作一个小数字键盘,增加了Delete按键,使用的是红轴机械按键,效果如下 二、环境 stm32f1 keil window10 三、正文
参考视频:【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程_哔哩哔哩_bilibili 参考文档:http://www.autolabor.com.cn/book/ROSTutorials/ 导航实现03_路径规划 毋庸置疑的,路径规划是导航中的核心功能之一,在ROS的导航功能包集navigation中提供了 move_base 功能包,用于实现此功能。 1.move_bas
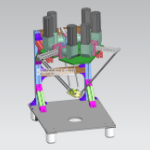
6轴并联机器人,6轴运动展示 6轴并联机器人,6轴运动展示,包括XYZ轴方向的移动,和围绕XYZ轴的旋转,每一组的2根驱动臂是分别驱动的,这也是有6个自由度的关键。伺服电机驱动的工业级产品正在开发中,可用于生产线上产品的捡拾,装配,和搬运 6轴并联机器人
近期在部署3d稀疏卷积,需要对Rulebook与weights的计算进行速度优化,先研究下cuda矩阵乘法,特此记录下: CPU void matrix_multiply_cpu(const float *A, const float *B, float *C, int M, int N, int K) { for (int i = 0; i < M; ++i)
在嵌入式开发领域,选择一款合适的开发工具至关重要。而VSCode作为一款轻量级、强大的编辑器,已然成为开发者的首选。 本文将推荐一些实用的、与我们嵌入式开发相关的VSCode插件。 serial terminal 这款插件提供了一个简单的串口终端,可以帮助我们轻松地与串口设备进行通信。它支持多种波特率和数据位格式,并且可以轻松地发送和接收数据。 GitLens GitLens 是
1.github官网下载源码2.配置深度学习环境3.下载模型4.照片上色代码 from deoldify import device from deoldify.device_id import DeviceId #choices: CPU, GPU0...GPU7 device.set(device=DeviceId.GPU1) from deoldify.visualize imp
win10似乎不太支持mujoco210+,但是如果直接命令行 pip install mujoco-py 就会安装上适配于mujoco210的mujoco-py,所以还是要手动装 参考链接:https://zhuanlan.zhihu.com/p/383655571 1.下载安装mujoco150 链接:https://www.roboti.us/index.html 下载mjpro15
几何法与代数法都属于位置级的逆运动学解法,即最终所求得的是机械臂关节位置变量的解析表达式,这些方法针对不同机械臂的具体解算过程是不一样的,而且机械臂必须满足一个必要条件,即机械臂的逆解存在解析解。前面的章节中我们已经研究过,并不是所有机械臂的逆解都存在解析解,因此,需要其他的方法求解该类机械臂的逆解。 下面,我们来看另外一种机械臂的逆运动学解法:速度级的雅可比方法(Jaco
刚刷机(或出厂默认状态)下,无论你的SD卡是16GB还是32GB,RDK系统仅使用14GB左右空间,所以有很多空间是闲置浪费的,后期如果想采集图片,那么空间将不够用。 所以,有必要手工做一次扩容操作才能让闲置空间发挥作用。 扩容有两种方法,一是在线扩容(即在系统已经启动时进行),二是离线扩容(即把SD卡拔下来用读卡器插到另一台Ubuntu电脑上用gparted操作) 方法一:在线扩容
BufferManager类处理主机和设备buffer分配和释放。 这个RAII类处理主机和设备buffer的分配和释放、主机和设备buffers之间的memcpy以帮助inference,以及debugging dumps以验证inference。BufferManager类用于简化buffer管理以及buffer和 engine之间的交互。 代码位于:TensorRT\samples\co
线程安全 在多线程编程中,线程安全是必须要考虑的因素。 什么是线程安全? 在多线程环境中,多个线程在同一时刻对同一份资源进行写操作时,不会出现数据不一致。反之,则是线程非安全的。 线程安全是程序设计中的术语,指某个函数、函数库在多线程环境中被调用时,能够正确地处理多个线程之间的公用变量,使程序功能正确完成。 为了确保在多线程环境中的线程安全,就要确保数据的一致性。确保线程安全的几种方法:
1.加载数据集,并对数据集进行增强,类型转换官网cifar10数据集附链接:https://www.cs.toronto.edu/~kriz/cifar.html读取数据过程中,可以改变batch_size和num_workers来加快训练速度 transform=transforms.Compose([ #图像增强 transforms.Resi
需要用到的工具是selenium, 引用下百度的解释: Selenium [1] 是一个用于Web应用程序测试的工具。Selenium测试直接运行在浏览器中,就像真正的用户在操作一样。支持的浏览器包括IE(7, 8, 9, 10, 11),Mozilla Firefox,Safari,Google Chrome,Opera等。这个工具的主要功能包括:测试与浏览器的兼容性——测试你的应用程序看是
参考视频:莫烦python https://mofanpy.com/tutorials/machine-learning/torch/torch-numpy/ 0.Pytorch 安装 官方网站安装链接:https://pytorch.org/get-started/locally/ 选择合适的选项,比如想要有 gpu 加速,就选择对应的 cuda 版本。查看自己的 cuda 版本用 nv
1 使用场景说明 1、例如,我们要查看opencv中有哪些颜色查找表(LUT),查看如下; cv2_luts = [lut for lut in dir(cv) if lut.startswith("COLORMAP_")] print(f"opencv lut colormap number: {len(cv2_luts)}") print(f"opencv luts colormap:
S型压力传感器也被称为应变片式压力传感器,是一种广泛应用于各种工业与科研领域的测量设备。核心工作原理是基于材料的应变效应,即当材料受到外力作用时,其内部会产生相应的应变,这种应变可以通过传感器转换为电信号输出,从而实现对外力的测量。 S型压力传感器的变形量具体有多大,实际上是一个相对复杂的问题,因为它涉及到多种因素的综合影响。以下是一些主要的影响因素: (1)材料性质:传感器的敏感元件
深度学习Pytorch框架学习之Mnist数据识别简单程序 代码 平台notebooks #!/usr/bin/env python # coding: utf-8 # In[31]: import numpy as np from torch import nn,optim from torch.autograd import Variable from torch
以下为正文效果如动画所示: 机械臂夹爪的控制选用了之前学习过的正点原子开发板舵机型号为S3010,是之前搞智能车竞赛剩下的,该舵机的转角与高电平的脉宽有关,黑线接地,红线接电源(5V),白线为控制线。 夹爪是在网上花十块钱买的 具体流程为使用两个按键控制夹爪的开合,按键0为夹爪合,按键1为夹爪开 1.按键处理函数 u8 KEY_Scan(u8 mode) {
搜罗了网上一些关于如何在python中实现海康威视相机的连接与画面播放的资料,最直接的方式是通过rtsp流来实现。 海康的rtsp协议格式如下(参考:海康相机使用RTSP): rtsp://[username]:[passwd]@[ip]:[port]/[codec]/[channel]/[subtype]/av_stream 主码流:rtsp://admin:12345@192.168.1
第三方账号登入
看不清?点击更换






















第三方账号登入
QQ 微博 微信