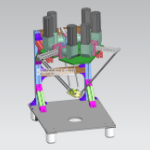
6轴并联机器人开发–有限元分析 对我的正式版并联机器人做了一个有限元分析,并根据计算结果对相应位置做了一下补强。在负荷50公斤时,承力件最大变形为0.013mm,满足要求。由于机器人运动时,最大加速度不超过10米/秒秒,即1G,而负荷也只有3~5公斤,加上所有运动系统也不会超过10公斤,所以变形仅为计算值的1/5,约为0.0026mm。 最终机械设计如下 顺便说一下,用的是UG NX20
代码已经开源:https://github.com/Xiao-Hu-Z/pointpillars_int8 安装环境 Prepare the OpenPCDet environment 导出onnx To export your own models, you can run python3 export_onnx.py \ --cfg_file pointpillar.yaml -
目录 1 一般概念 1.1 基元的变换 1.2 一个参数化的变换族 2 2D变换 2.1 translation 2.2 rotation 2.3 Combining translation and rotation 3 3D变换 3.1 Yaw, pitch, and roll rotations 3.2 Determining yaw, pitch, and roll fr
前言 正则表达式是一个特殊的字符序列,它能帮助你方便的检查一个字符串是否与某种模式匹配。 Python 自1.5版本起增加了re 模块,它提供 Perl 风格的正则表达式模式。 re 模块使 Python 语言拥有全部的正则表达式功能。 一、re.match与re.search re.match函数 re.match 尝试从字符串的起始位置匹配一个模式,如果不是起始位置匹配成功的话,m
一、引言 1、AGV需要同时具备定位、避障与导航的功能,其中避障对于雷达本身的分辨率、精度要求并不是很高,只需要能够根据预设定的雷达扫描范围准确避开障碍物即可,故本文以TIM240(SICK激光类雷达)为例介绍实现多雷达时空标定的问题。2、多个避障雷达可能会被安装在车体各个位置,并且不一定有重叠区域,所以通过提取特征点再进行ICP或NDT配准的方法获取相对位姿变换关系的方式不可行,由于机械结构本
感受野 感受野(Receptive Field),指的是神经网络中神经元“看到的”输入区域,在卷积神经网络中,feature map上某个元素的计算受输入图像上某个区域的影响,这个区域即该元素的感受野。 理解简化:在卷积神经网络的某feature map上的某个元素,它存在一个感受野,感受野大小为输入图像的某块区域。这块区域的像素值一层层卷积、pooling等操作最终计算出了这个元素的值。输入图像
Lego_Loam包括了Image projection、Feature association、MapOptmization、Transform Fusion四个部分,下面博主将按照算法的逻辑顺序对代码中的重要函数进行讲解。本节是解析MapOptmization文件和Transform Fusion文件。该专栏的其他章节链接如下https://blog.csdn.net/HUASHUDEYANJ
A Survey on 3D Gaussian Splatting论文:https://arxiv.org/abs/2401.03890 一、文章概述 1.问题导向 基于图像的3D场景重建时机器理解现实世界环境复杂性的基础,促进了3D 建模和动画、机器人导航、历史保存、增强/虚拟现实和自动驾驶等广泛应用。3D 高斯抛雪球被视为下一代3D重建和表示的潜在游戏规则改变者,开辟了大量的应用程序,具有巨大
描述 原文:Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs 系列文章的第一篇,发表在2014年CVPR。 在语义分割中,通常会使用分类网络作为backbone。通过backbone之后会对特征图进行一系列的下采样,之后再进行一系列的上采样还原原图的大小 Abstract 深度卷积神经
简介:介绍Intel realsense D435 在EHub_tx1_tx2_E100载板,TX1核心模块环境(Ubuntu18.04)下测试ROS驱动,打开摄像头图像和查看深度图和点云图,本文的前提条件是你的TX1里已经安装了ROS版本:Melodic。关于测试硬件EHub_tx1_tx2_E100载板请查看:EdgeBox_EHub_tx1_tx2_E100 开发板评测_机器
//一直都想把字符串操作常用的函数总结一些,不全但重在积累; 字符串的比较: 语法: int compare( const basic_string &str ); int compare( const char *str ); int compare( size_type index, size_type length, const basic_st
本文参考书籍《最优化计算方法》,部分图片来自最优化:建模、算法与理论/最优化计算方法 (pku.edu.cn),若侵权请联系删除 目录 1 线搜索方法简介 2 单调线搜索准则 2.1 Armijo准则 2.2 Goldstein准则 2.3 Wolfe准则 3 非单调线搜索准则 4 线搜索算法 5 收敛性分析 1 线搜索方法简介 对于无约束优化问题,寻求最小值的
一、引言 1、本博文主要讲具体的实车调试的配置过程。2、底盘是松灵的底盘,已经提供了ros接口,只需要发布cmd_vel话题给相应的速度和角速度的值就可以控制其移动,所以我们只需要关注move_base包的输入,以及如何给定位信息即可。 二、整体思路与流程 1、tf_tree的搭建(1)tf_tree可以理解为各个坐标系之间的变换关系,一个最基本的tf_tree为map->odom-&
最初我只知道用ASCII码的顺序来转换,今天学了一个新方法 方法一: #include <bits/stdc++.h> using namespace std; int main () { char ch[10]; for(int i=0;i<10;i++) ch[i]='0'+i; for(int i=0;i<10;
Java Script Object NotationJSON :Js对象简谱 XML:数据交互格式是个老生常谈的问题,在C语言时代的时候产生过多种数据交互格式,数据交互格式的本质就是数据结构,数据结构的易读写性,可嵌套性,可扩展性,可压缩性是一个数据结构是否优秀的重要参考。最早人们经常用一些简单的类似.txt文件的文本去表示一些需要再次读写的数据和配置参数。由于这种个人随心定制的文本的数据结构
一、简介 一个基于51单片机的电子秤,主要涉及到传感器数据的采集、处理和显示。这种电子秤可以用于重量的精确测量,广泛应用于商业、实验室和家庭等场合。通过这样的设计,可以实现一个功能全面、操作简便、测量准确的电子秤。这不仅是一个实用的测量工具,也是一个很好的嵌入式系统设计和编程学习项目。 二、设计思路 一个基于51单片机的电子秤,主要涉及到传感器数据的采集、处理和显示。这种电子秤可以用于重量的精确
关于举办第一届“地平线杯”深圳大学智能机器人大赛的通知 Part.1/ 竞赛组织机构 1. 主办单位:教务部、研究生院 2. 承办单位:物理与光电工程学院 3. 赞助单位:地平线 由物理与光电工程学院创新部、沐光双创中心、智能感知与控制创新创业教育示范基地联合组织并设立专家委员会和裁判委员会负责大赛的评审工作;同时设立仲裁委员会负责比赛过程的监督和异议处理。 Part.2/ 参
论文地址:https://arxiv.org/abs/2308.04079项目:https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/代码:git clone https://github.com/graphdeco-inria/gaussian-splatting —recursive 一、文章概述 1.问题导向 辐射场:辐射场是三维
一、简介 51单片机与PC之间的485串口通信是一种常见的工业通信方式,它利用RS-485标准进行数据传输。RS-485是一种差分信号传输标准,具有较长的传输距离(可达1200米)和较高的抗干扰能力,适合于工业环境中的多点通信。 二、设计思路 2.1硬件连接 1. 51单片机端: 51单片机通常通过UART(通用异步收发传输器)与RS-485模块相连。 RS-485模块通常有A、B两根线(对应差
一、简介 基于8051系列单片机实现,旨在模拟一个简单的交通灯系统,实现红、黄、绿灯的交替亮灭。使用了特殊功能寄存器(SFR)和位操作来控制硬件,使用定时器0的中断功能来控制交通灯信号的切换。通过软件控制,实现交通灯的红、黄、绿灯的亮灭和闪烁。 二、头文件选择,变量定义 在8051微控制器上基于嵌入式C语言的程序片段。定义一系列的宏定义、全局变量和特殊功能位(sbit),用于简化寄存器操作和提高代
第三方账号登入
看不清?点击更换
























第三方账号登入
QQ 微博 微信