

上一节:视觉伺服
Eye-in-hand Setup:
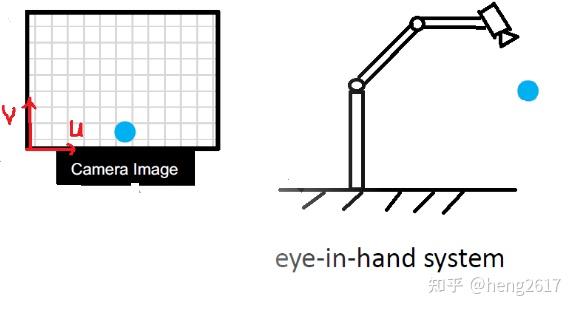
相机在基本坐标系中的姿态为 ,
物体相对于相机的位置
在图像上的特征位置 ,
有如下关系:
是特征空间的维度,
是任务空间(操作空间)的维度
例:
推导:
第一步: ,已知
,
,根据3D的透视投影有
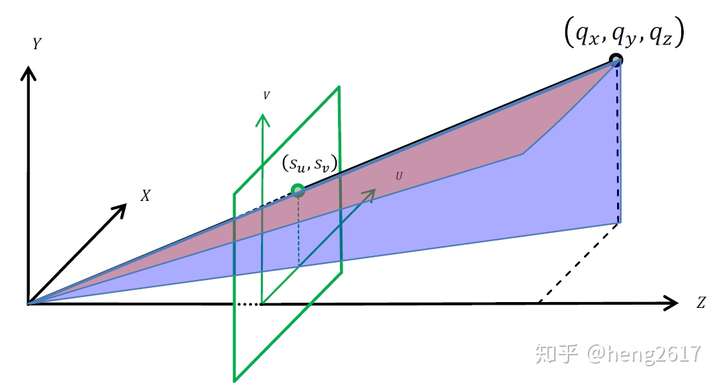
其中 是相机焦距,
是物体相对于相机的3个方向上的距离。
第二步: ,对第一步的
和
求导有:
第三步: ,已知
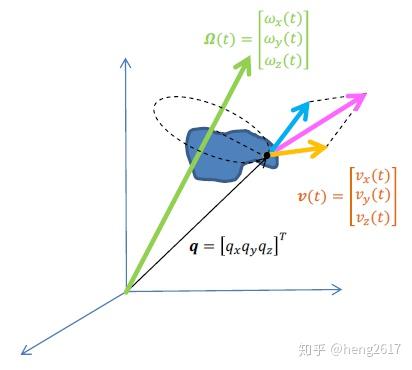
同时,我们也知道,如果我们移动点 有
而当我们移动末端执行器/相机有:
由第一步有: ,
代入第三步有:
于是把 ,
,
,
,
代入第二步:
写成矩阵的形式:
第二种方式:矩阵
第二步改写成矩阵形式:
第三步改写成矩阵形式:
于是有:
那么:
即:
例:
假设一个机械手臂要跟随一个圆(一张纸上打印一个圆)运动,用圆的圆心位置和半径作为特征,即: ,相机始终正对着圆,所以这里不用考虑旋转,所以相机相对于基本坐标系可以用
表示。那么
将是一个
的矩阵。
第一步:根据3D透视投影可以得出特征和相机位置的关系:
其中, 分别是圆相对于相机的宽、高和距离,
是圆的半径(相对于相机而言),是个常量。
第二步:对特征进行微分:
第三步:根据物体相对于相机的位置关系和相机相对于基本坐标系的关系,得到物体相对于基本坐标系的关系
移动相机坐标系 ,相当于移动相机坐标系中的特征
,即:
,把
,
,
,
代入第二步:
也就呼之欲出了。



评论(0)
您还未登录,请登录后发表或查看评论