

简介
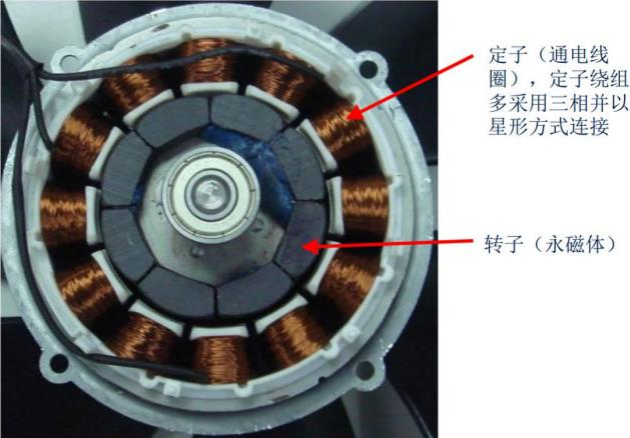
直流无刷电机(Brushless Direct Current Motor,简称 BLDCM)顾名思义没有了直流有刷电机中的电刷和换向器等结构,因此线圈绕组不参与旋转,而是作为定子,永磁体作为转子,所以需要通过控制线圈电流方向来改变磁场方向从而使转子持续旋转,同步进电机不同的是,无刷电机绕组通常是 3 组,并且只有 3 个引出接线端子,一般为星形接法,3 组线圈的起始端通过电机内部连接到一起,剩余的一端引出作为电机的引线。由于无刷电机的换向需要根据转子位置确定,因此一般无刷电机有霍尔传感器,用于提供转子位置信息,当然也不是必需的,还可以通过无感的方式,用仅有的 3 根电机线来分析和确定转子的位置、转速等信息。
直流无刷电机与直流有刷电机的特点
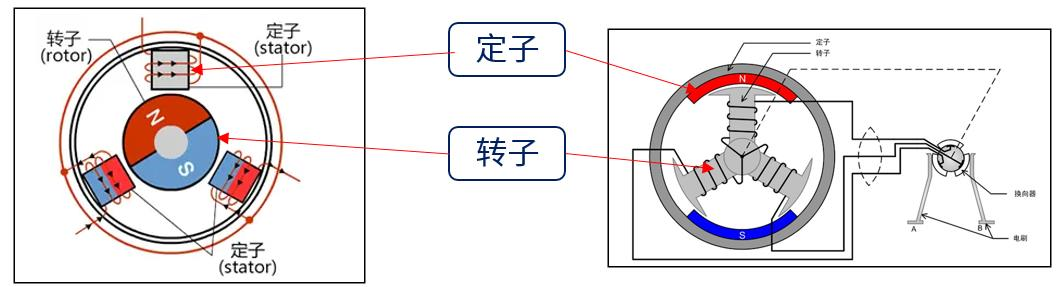
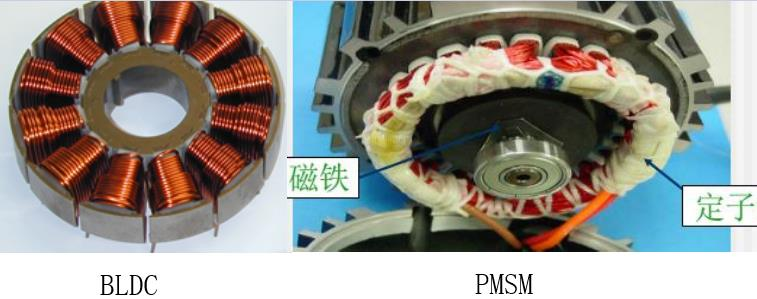
- 可以从图 a 与图 b 中看出有刷电机与无刷电机之间最大的结构区别在于:无刷电机没有电刷以及换向器;并且无刷电机的线圈绕组不参与旋转,而是作为定子,永磁体作为转子,与有刷电机是相反的结构。
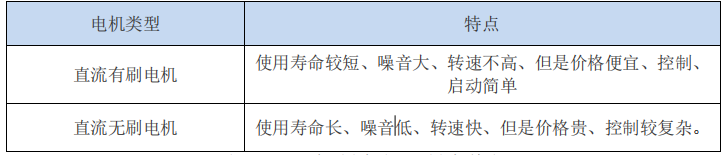
- 无刷电机其性能相比于有刷电机有很大优势,由于没有了碳刷结构,所以干扰小、噪音低、运转流畅、高速而且寿命更长。缺点就是控制较为复杂、成本比有刷电机贵。在四轴飞行器,汽车,工业工控上的应用非常广泛。下面总结了关于直流有刷电机以及无刷电机的特点,如下表:
直流无刷电机的分类
以驱动方式进行区分。
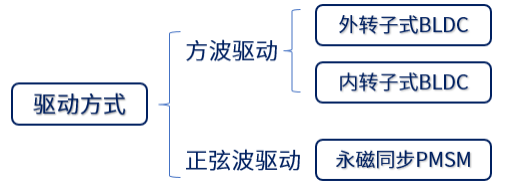
可以看到,直流无刷电机以驱动方式进行分类,可以分为:
方波驱动,其中方波驱动又分为:外转子式 BLDC、内转子式 BLDC
正弦波驱动分为:永磁同步电机(PMSM)

上图无刷电机为外置式转子,即磁体做成的转子在外侧,内侧的定子是缠绕漆包线的硅钢叠片,主要应用于四轴飞行器等。

上图无刷电机类似步进电机的一种结构,即磁体转子在内侧,硅钢片定子在电机外侧。一般电机直径和长度越大,扭矩越大,有时还通过减速齿轮组来增大扭矩,在工业工控上的应用非常广泛。

上图为永磁同步电机(PMSM)该电机一般都配有高精度编码器,优点显著,精度高,效率高,运行可靠,损耗小,在精度要求较高的场合被广泛应用。适合高级控制方式——FOC。
BLDC 和 PMSM 的区别
BLDC 与 PMSM 电机在控制方式、运行方式、绕组方式等等,都有很大的区别,最主要的区别就是反电动势不同,BLDC 接近于方波,PMSM 接近于正弦波。

直流无刷电机的主要参数
- 极对数:转子磁铁 NS 级的对数,此参数和电机旋转速度有关:电子速度 = 电机实际速度 * 极对数。
- KV 值:电机的运转速度,值越大电机转速越大。电机转速 = KV 值 * 工作电压。同系列同外形尺寸的无刷电机,根据绕线匝数的多少,会表现出不同的 KV 特性。绕线匝数多的, KV 值低,最高输出电流小,扭力大;绕线匝数少的, KV 值高,最高输出电流大,扭力小;
- 额定转速:额定的电流下的空载转速,通常单位用 RPM 表示;
- 转矩:电机中转子产生的可以带动机械负载的驱动力矩。通常单位为:N.M;
直流无刷电机的基本控制原理
安培定则,也叫右手螺旋定则,是表示电流和电流激发磁场的磁感线方向间关系的定则。这里利用定则之一:当用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端是通电螺线管的 N极。
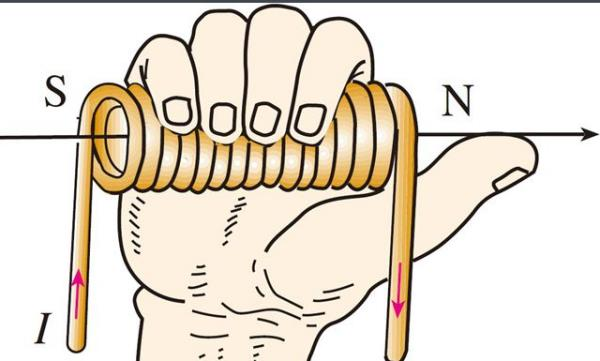
- 所以通电线圈会产生磁场,可以把通电线圈的磁场看成一个磁体
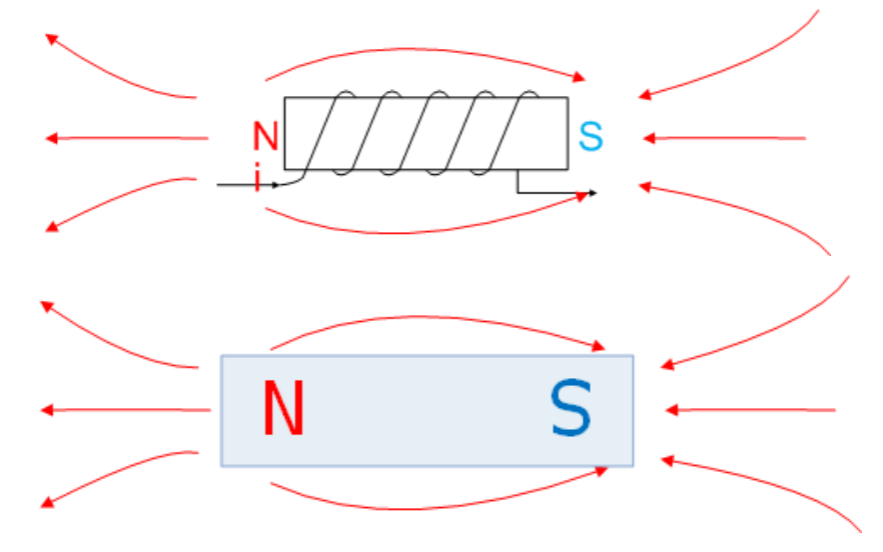
磁体之间,存在异性相吸,同性相斥的原理,通电线圈和永磁体之间同样存在,而无刷电机就是利用了通电线圈和永磁体的相互作用原理,下面看下 BLDC 的内部结构
无刷电机的 3 根电机线按顺序依次叫 U 相线(一般为黄色),V 相线(一般为绿色)和 W 相线(一般为蓝色),3 组漆包线绕组的一端连接在一起,另外一端引出即为 UVW 相线,所以任意两根相线通电都可以导通这两个线圈,除此之外,一般无刷电机还有另外一组引出线,即霍尔传感器线,一般有 5 根分别是:
- 1:红色霍尔电源线正极;
- 2:黑色霍尔电源线负极;
- 3:黄色霍尔 U 相输出;
- 4:绿色霍尔 V 相输出;
- 5:蓝色霍尔 W 相输出,
霍尔传感器的 3 相电平输出主要用于指示无刷电机转子的位置。接着来分析直流无刷电机的驱动原理,为了方便分析,将上述无刷电机实物图的结构简
化为以下形式
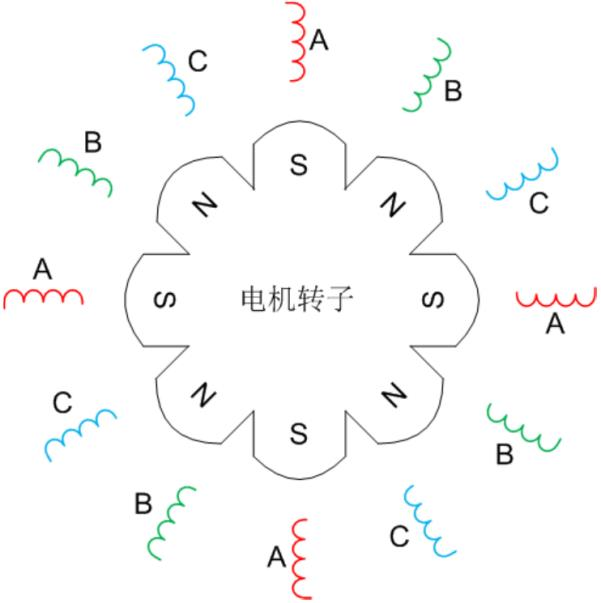
极对数过多不易于分析所以进一步简化为

其中 COM 为公共结点,就是将 UVW 三相的一端短接一起形成的节点,另外一端引出,所以可以看作 3 个有公共端的线圈和一个永磁体结构
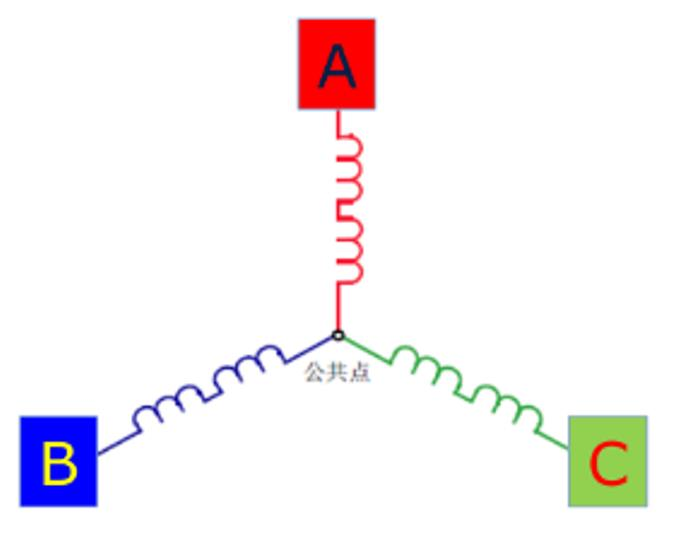
此时将转子放上,并将 A、B、C 改为 U、V、W 三相方便理解

上图反映了 U 相接正极,W 相接负极,V 相开路,那么此时电流由 U 相流到 W相,同时 U 相和 W 相产生的磁场合成的磁场矢量方向即为转子磁场方向。
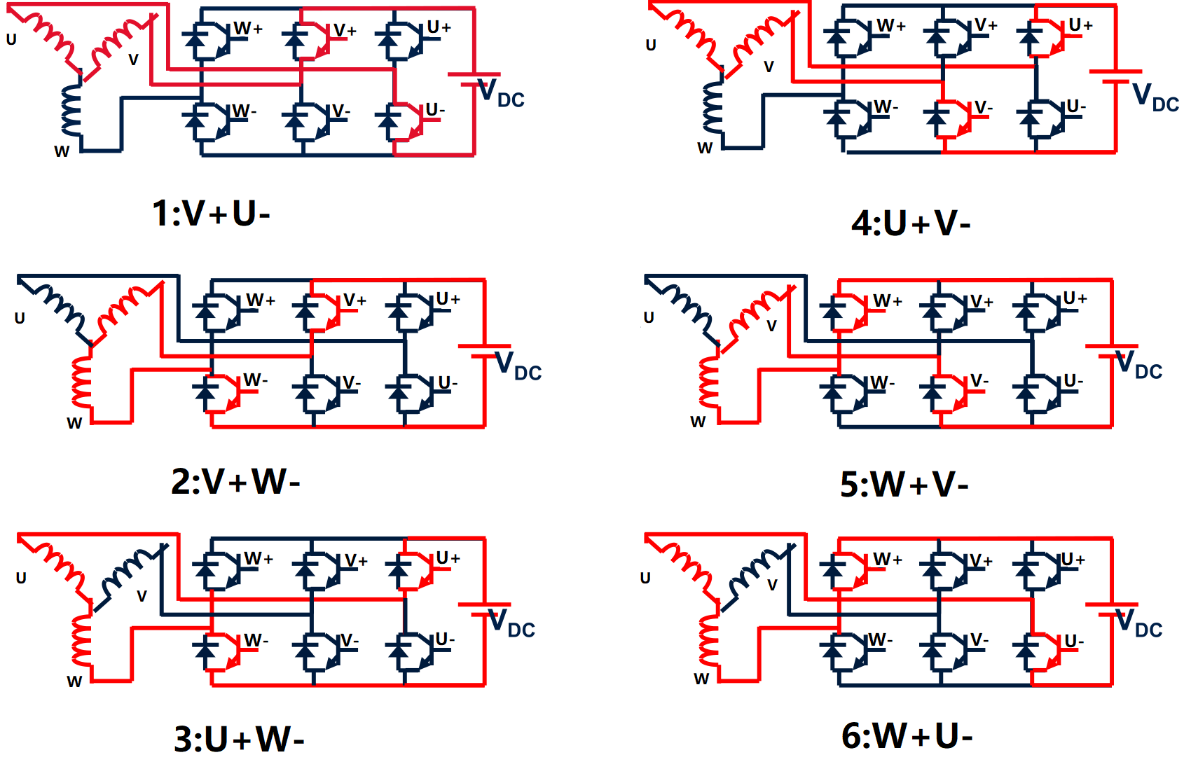
- 由于 BLDC 的运行方式为绕组两两导通,所以三相线圈的导通组合只有 6 种通电情况,根据合理的顺序依次切换通电顺序即可让转子跟着磁场转起来。
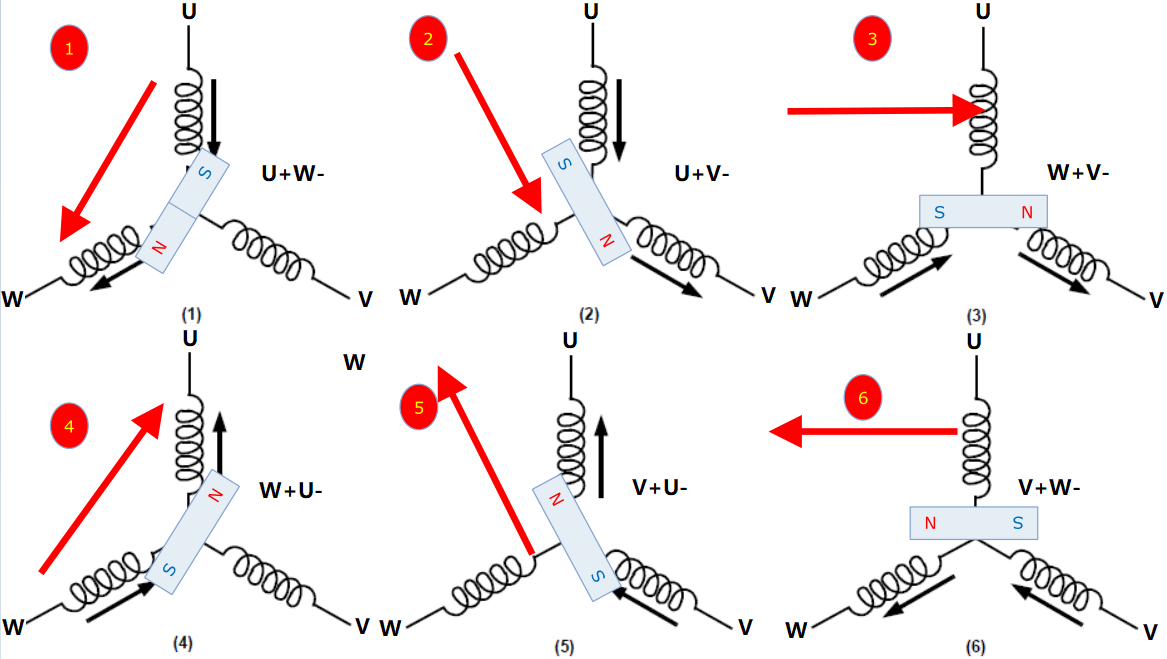
由上图可知,想要控制 BLDC 旋转,根本的问题就是产生这 6 拍的工作方式的电压信号(称为 BLDC 的六步控制),假设 BLDC 的额定电压为 24V,电机的三根相线定义为 U,V,W:
- 给 U 接 24V、V 悬空、W 接 GND,此时电机的转轴对应上图(1)的转子位置。
- 在上一步的基础上修改接线方式,给 U 接 24V、V 接 GND、W 悬空,此时电机的转轴对应上图(2)的转子位置,相较于(1)旋转了一个角度。
- 在 2.的基础上继续修改接线方式,U 悬空,V 接 GND,W 接 24V,此时对应(3)。
- 在 3.的基础上继续修改接线方式,U 接 GND,V 悬空,W 接 24V,此时对应(4)。
- 在 4.的基础上继续修改接线方式,U 接 GND,V 接 24V,W 悬空,此时对应(5)。
- 在 5.的基础上继续修改接线方式,U 悬空,V 接 24V,W 接 GND,此时对应(6)。
同样的,如果顺序相反则无刷电机会反向旋转。同步进电机类似,实际上步进电机也算是无刷电机,所以无刷电机也会存在步进电机那样的问题,即丢步,原因也是定子产生的磁场没有来得及改变定子的位置,一般也可以增大驱动电流来缓解。一般步进电机没有转子位置传感器,但是无刷电机一般是有的,传感器需要独立供电,一般直流 5~24V 即可,传感器有 3 根输出信号线,同样排除全部高、低电平情况也是 6 种状态。
不管是 U 相、V 相、W 相在 6 种状态里边有时需要接正极,有时需要接负极,所以就有个问题了,如何简便的控制三相极性的切换?使用三相
逆变电路来实现。
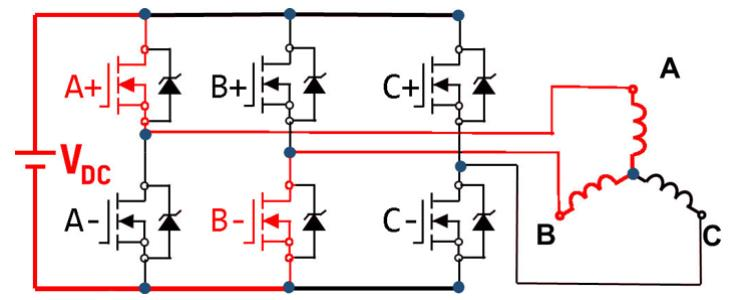
- 三相逆变电路就是由三个半桥构成的电路,图 21.2.9 中的 A+与 A-为一个半桥,B+与 B-以及 C+与 C-各自又为一个半桥,共三个半桥;这三个半桥各自控制对应的 A、B、C 三相绕组;当控制 A 的上桥臂 A+导通时,此时 A 相绕组接到电源正,当控制 B 的下桥臂B-导通时,此时 B 相绕组接到电源负,所以此时电流由 A 流向 B。
- 所以想要控制绕组的极性,只需要控制绕组对应半桥的“上桥臂导通”或者“下桥臂导通”就可以实现控制该相连接至“正极”或者“负极”了,但是要注意不可以同侧半桥上下桥臂同时导通,负责会短路,烧毁电机!实现图 21.2.8 中的 6 步控制,就可以通过三相逆变电路来实现。
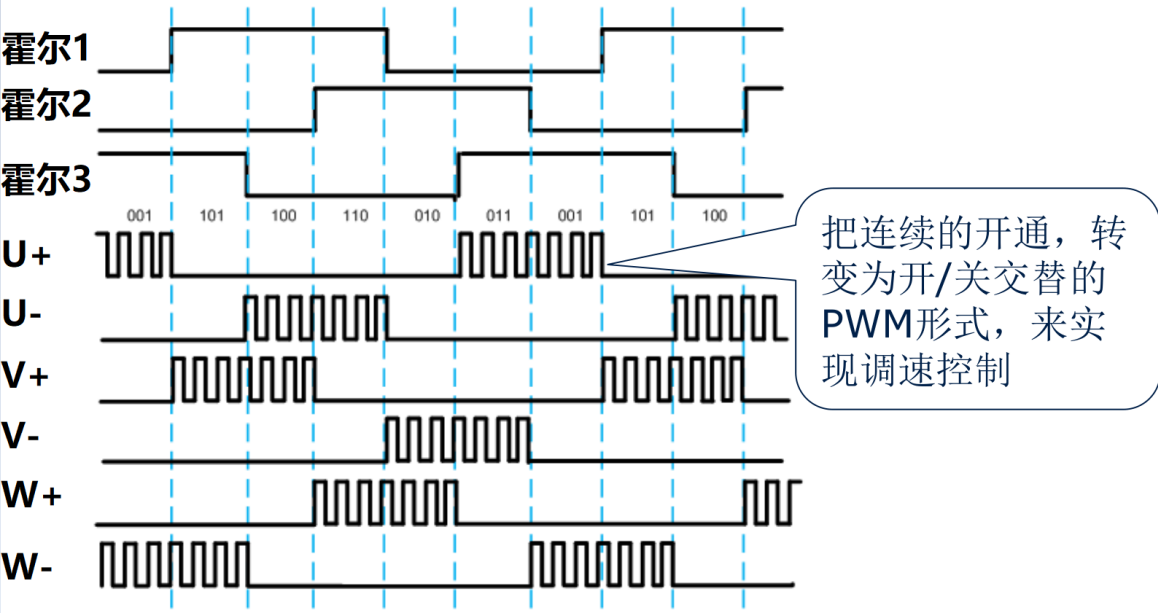
以上方式直接把电源加载到线圈上,这样会直接使电机很快飙到很高的速度,这样不利于控制,所以一般工作时都是将高低电平用 PWM 来代替,这样可以
方便的控制线圈电流,从而控制转子扭矩及转速。接着就来看下 PWM 控制方式的示意图:
通常使用 PWM 控制直流无刷电机的常见方法有 5 种,分别是: PWM – ON、ON–PWM、H_ON – L_PWM 、H_PWM – L_ON、H_PWM – L_PWM。且均是电机处于 120°的运行方式下进行的。
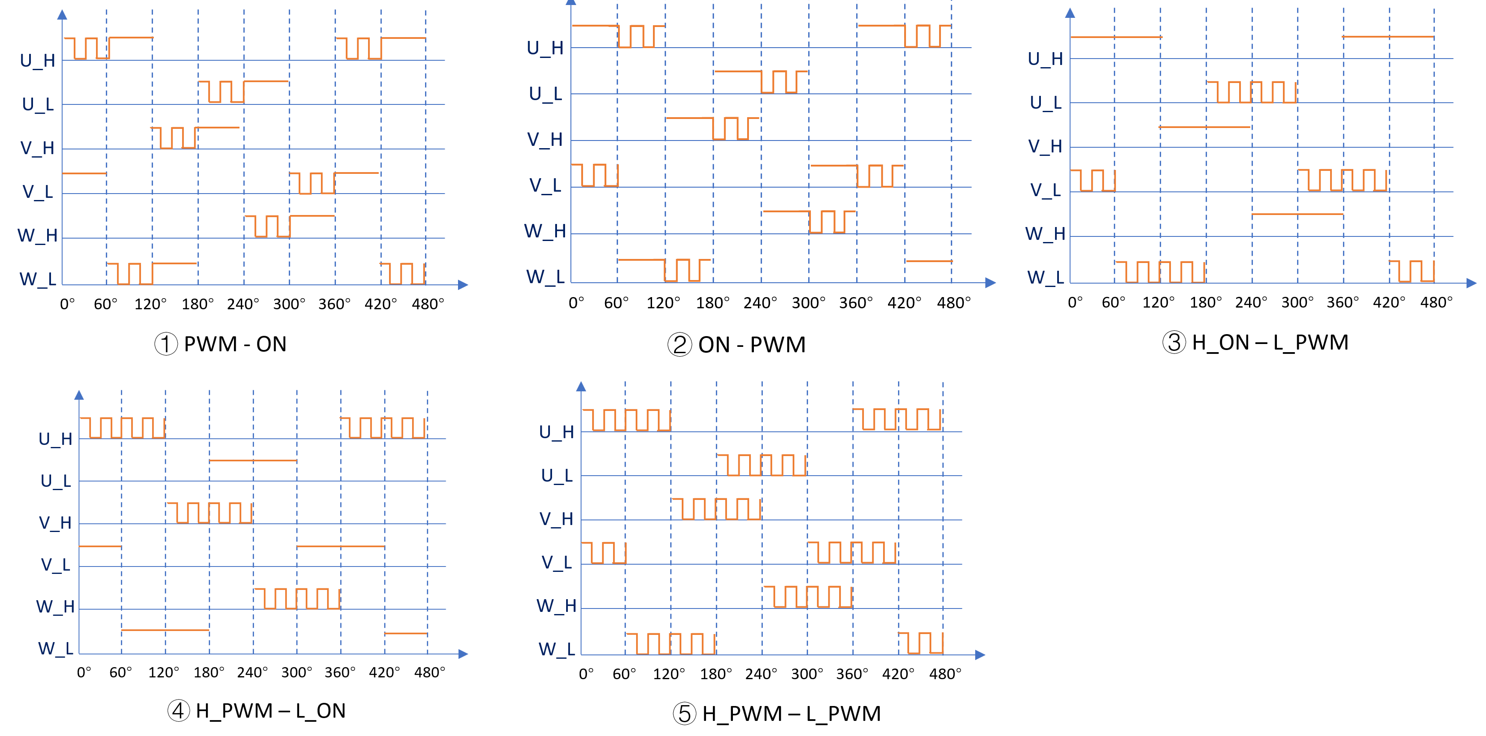
- (1)采用 PWM-ON 方式时,下桥换相和上桥换相的换相转矩脉动相等,且最小;非换向相电流脉动也是最小的;
- (2)采用 ON-PWM 方式时,下桥和上桥换相转矩脉动相等且比 PWM-ON 方式大,非换向相电流脉动也比 PWM-ON 方式时大。
- (3)采用 H_ON - L_PWM 方式时,下桥换相转矩脉动和非换向相电流脉动小且与 PWMON 方式时的转矩脉动和电流脉动相等,上桥换相转矩脉动和非换向相电流脉动大且与 ON -PWM 方式时的转矩脉动和电流脉动相等。
- (4)采用 H_PWM - L_ON 方式时,下桥换相转矩脉动和非换向相电流脉动大且与 ONPWM 方式时的转矩脉动和电流脉动相等,上桥换相转矩脉动和非换向相电流脉动小且与PWM-ON 方式时的转矩脉动和电流脉动相等。
- (5)采用 H_PWM - L_PWM 方式时,换相转矩脉动最大且非换向相电流脉动也最大。不同的控制方式在性能上有不同的效果,针对实际的应用场合可以多尝试多种调制方式,然后选择最优调制方式,一般认为:单极性调制转矩波动更小,双极性调制转矩波动较大。例程依据的驱动硬件所使用的是 H_PWM – L_ON 的驱动方式。



评论(0)
您还未登录,请登录后发表或查看评论