0.前言 局部优化作为VSLAM当中常用的策略,其作用相当于激光SLAM中的局部地图的ICP or NDT优化(scan2localmap)。如下图所示,在VIO当中,随着时间的推移,路标特征点(landmark)和相机的位姿pose越来越多,BA的计算量随着变量的增加而增加,即使BA的H矩阵是稀疏的,也吃不消。因此,我们要限制优化变量的多少,不能只一味的增加待优化的变量到BA里,而应该去掉一些变
使用点云库(Point Cloud Library, pcl)可以三维图像传感器的数据。这个开源库是独立的,但是可以在ROS中使用。pcl中提供了一系列函数来处理三维数据。本文使用一些常用的函数介绍一些简单的功能。 简单的点云显示节点 硬盘中加载并显示点云 使用PCL方法解读点云图像 寻找物体 简单的点云显示节点 pcl_utils包中包含了源文件display_ellipse.cpp和
0. 下载链接 realsense-ros:https://github.com/IntelRealSense/realsense-ros 1. 查看模型 roslaunch realsense2_description view_d435_model.launch 2. 将相机添加到 UR3 模型中 2.1 新建 ur3_ft_gripper140_realsensed435_robot
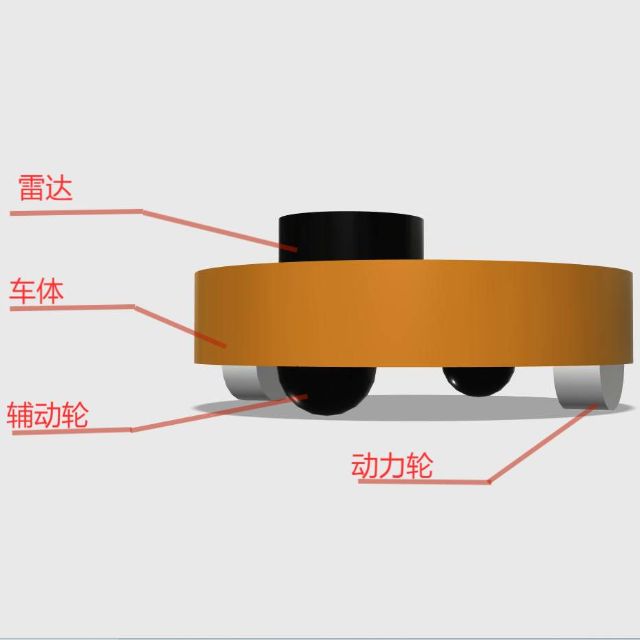
ROS教程 这是小弟的学习笔记,有错求请拍,多指教,谢谢 二 树莓派3+ROS-kinetic+mbed/开环二轮差分模型 二轮差分模型介绍 1.二轮差分模型 二轮差分运动模型是目前最为简单方便的机器人运动底盘设计,依靠两个动力轮的电机输出不同达到直线行走和左右转动的目的,左右电机的转向不同即可完成转动,常见于寻迹小车,扫地机器人,送餐机器人等,底盘较为灵活,编程,机械设计都很简单,但缺点
不久前,师弟问了我一个问题:“师兄,我要控制一个机器人在仿真环境下运动,需要学什么,或者从哪里入手呢?“ 这个问题不是那么好回答,urdf——Gazebo——ros_control——MoveIt,这是我在很久后才能给出的一个答案。那么之前我是怎么做仿真的呢? 1. 借助Arbotix舵机接口来仿真 之前是在学习《ros by example volume 2 》的时候,接触到一个rb
0. 准备工作0.1 查看现在的 UR3 机器人模样安装 robotiq_ft300.urdf前的 UR3 机器人是这样的(注意末端的样子): roslaunch ur_description view_ur3.launch 0.2 robotiq下载链接https://github.com/ros-industrial/robotiq 0.3 文件路径各个文件的路径见效果图的上面部分。1.
ROS下单目摄像头的Calibration 安装usb_cam包 sudo apt install ros-melodic-usb-cam* 该包将摄像头的图像通过sensor_msgs::Image消息发布。 启动摄像头 可以用默认的参数启动摄像头: rosrun usb_cam usb_cam_node 当然也可以配置摄像头的参数。安装好usb_cam包后,在/opt/ros/melodic/
文章目录 终端输出的错误 解决方法 终端输出的错误没有设置 pid: [ERROR] [1627052671.393262001, 0.145000000]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/shoulder_pan_joint [ERROR] [1627052671.393864586,
为什么使用Industrial_trajectory_filters包?因为Moveit生产的轨迹是等距而非等时的。但是在工业应用的机器人中,通常都是按照固定的周期来控制关节轴运动。因此moveit原生的轨迹与实际机器人控制需求之间存在不匹配,这就需要通过一定的方法或工具来进行对接。Industrial_trajectory_filters功能包便可以解决轨迹对接匹配问题。为了使用Industri
Gazebo11的安装与启动 1、安装Gazebo11 因为之前虚拟机开Gazebo总闪退,参考了 https://blog.csdn.net/weixin_41754912/article/details/82861566 的方法可以打开,但是运行比较卡顿。 ROS Melodic 版本默认安装的是 Gazebo9,现在 Gazebo 最新版本是11,对 Gazebo 进行更新。
文章目录 下载链接 修改方法 下载链接 UR5 模型链接:https://github.com/ros-industrial/universal_robotKinect V2 模型链接:https://github.com/wangxian4423/kinect_v2_udrf 修改方法 将下图中的内容复制: 粘贴到下图位置,并注释掉其中一行: 这里我复制 ur5.launch 的内容
在使用Moveit联合Rviz进行运动规划时,场景中单单只有一个机器人通常是不太够的。一方面,机器人的操作对象可能是不同形状的物体,需要被添加到场景中。另一方面,操作物体的放置环境(比如桌面等等)也应该模拟出来。因此,如何在场景中添加一些必要物体是非常重要的。 Rviz中的MotionPlanning插件中,可以一个一个地添加模型文件到场景中去,但这种方式只适合简单的场景。而且,当你通过某种方式将
前言 在学习ROS2时,本来满怀欢喜的,不想刚刚开始就受到了打击。真的想摔键盘骂娘,这是什么破玩意儿,这么个半成品也好意思拿出来正式发布,连个像样的文档也没有。在ROS1中要显示机械臂的模型是一件非常简单的事情,但在ROS2中却感觉无从下手,在google中竟然没有一篇文章介绍怎么来操作。本着不放弃的精神,还是好好研究一下其中的原委吧。 尝试 在ROS2中提供了一个dummy_robot_brin
在开始介绍本开源项目的机械结构设计之前,先和博友们用一篇博文分享一下机械设计工作相关的特点、性质。抛出结论:笔者觉得在机器人领域,机械结构设计基本上是决定一个产品能否实现或超预期实现预设功能的关键之一,因为一切上层软硬件都是基于机械本体完成的。 一、机械结构设计思考 机械结构设计是一种看着门槛比较低,实际上有需要非常专业的知识背景作为支撑,经过长期的经验积累才能成为合格的结构设计工程师,专业知识
快一年没用ROS了,不过尽管如此,如果有人问之前写的ROS博客问题,还是会很仔细得回答。结合这些问题,加上之前的一些经历和经验,进行一个简单的整理和总结。本文前半部分前ROS的开发经历,后半部分讲做机器人的难度,也就是做机器人生意。 目录 1 机器人 2 ROS 2.1 ROS初探 2.2 ROS的简单开发及其理解 2.2.1 ROS核心框架 2.2.2 catkin workspace 2.2.
joint_state_publisher前面两篇文档已经分析了moveit使用Action方式与实际的关节控制器进行通信并控制关节电机旋转,现在我们再来分析一下关节状态的返回。仍然以moveit提供的panda_moveit_config包为例。查看demo.launch文件,可以看到里面有如下内容: <arg name="use_gui" default="false" /> &l
在<ROS中Moveit生成的轨迹如何作用与实际的机器人(一)>中,我们论述了moveit怎样产生机械臂的轨迹规划点,并创建了一个Action Server节点来接受轨迹点信息。接下来便是考虑用这些轨迹点来使一个实际的机器人运动了。 由于PC上缺乏直接的产生脉冲的设备,因此我们就需要再借助额外的硬件来完成。那么就有两种方案来实现。 在Action Serve节点中进行细插补,再通过串
一、前言 很多正在学习ROS的小伙伴都有这样的困惑:学了ROS可以做什么?我该从哪一步开始?什么姿势入门最适合自己?迷茫混乱的时候若是有人指明方向就更好了。 这不就来了:古月居针对部分对该职业方向有意向/正在学习的小伙伴,分析了北京、上海、江苏等多地公司的岗位招聘要求,为各位规划出一条清晰、全面、系统的ROS开发工程师养成之路,希望看完能让小伙伴们对该职业的学习路径有更加清晰的认知,用最容易的姿势
编译Darknet git clone https://github.com/pjreddie/darknet 修改Makefile文件 GPU=1CUDNN=1OPENCV=1OPENMP=0DEBUG=0 cd darknet make 安装CUDA: wget https://developer.download.nvidia
话不多说,先看视频。没有声音的视频,大家可以来盲猜一下这是啥~ 怎么说呢,一直在玩ROS和Arduino搭档的开发,rosserial、ros_arduino_bridge、StandardFirmata、Modbus,这些都玩了,但是ROS的无线方案确实是少。 之前考虑使用Arduino Nano+OLED屏幕的方式来做一个ROS周边的显示模块,然后碰到了两个内存大户——rosserial和
第三方账号登入
看不清?点击更换






















第三方账号登入
QQ 微博 微信