matplotlib生成三维点云包围盒 运行环境: win10、 python3.5.2、 matplotlib 评价:消耗时间较长 效果展示: 运行上面包围盒消耗的时间:单位(秒/s) 代码: from mpl_toolkits.mplot3d impor
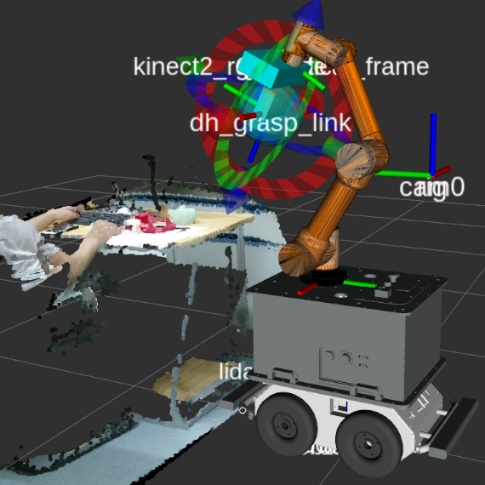
之前关于机械臂的教程《ROS机械臂控制之跟踪二维码》,控制程序是比较简陋的。 使用起来也是有限制的,必须在机械臂的工作空间中才可以执行规划,否则就会报错退出。 因此本次我在程序中做了很多规则,基于规则,机械臂订阅的话题消息得到后期的实时处理,经过处理的位置信息发给ros_control保证机械臂不会规划失败。 效果如下,只要不让目标出相机视野,就能实现丝滑的跟踪效果。 &n
效果: 卡顿现象严重,初步显示还行,后期需要寻找其他显示方法 代码: import numpy as np import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D #f=open('point cloud.txt','r') f=open('11D
pointnet训练文件pointnet/sem_seg/train.py注释 原文如下: import argparse import math import h5py import numpy as np import tensorflow as tf import socket import importlib import os import sys
pytorch 利用tensorboard显示loss,acc曲线等 运行环境: python3.6.9 pytorch1.13.1 cuda10.0 cudnn7.5.1 tensorboard显示 运行PointRCNN算法进行training,得出events.out.tfevents.1592297776.hkd-Precision-792
1. IOU(Intersection over Union) -交并比 IOU是一种测量在特定数据集中检测相应物体准确度的一个标准。在PASCAL VOC challenge中经常使用该标准。 一般在 HOG + Linear SVM object detectors 和 Convolutional Neural Network detectors (R-CNN, F
1、卸載低版本 先查看是否已經安裝cmake cmake --version 如果安裝了,並且版本低,首先進行卸載 sudo apt-get autoremove cmake 如果出現下面錯誤提示,那說明你沒有卸載哦~ CMake Error: Could not find CMAKE_ROOT !!! CMake has most l
如图所示,我在自己的qt界面中创建了一个新的motion planning,但是interactivemarker会跑到rviz中显示,有哪位大佬知道是什么问题吗?
背景介绍 首先我的环境是POP!OS18。PopOS(即 Pop!_OS)是知名 Linux 电脑制造商 System76 推出的、基于 Ubuntu 的 Linux 发行版,主要用于自家电脑硬件产品,也可用于其他电脑制造商 OEM。最主要的特点是比Ubuntu漂亮一些,流畅度上大致相同。所以,虽然系统不一样,但是和Ubuntu18理论上是一样的。但是不能保证每个人都能实现,毕竟稍有一些不一样的地
ROS学习(问题)笔记 一、安装Ubuntu; 安装ubuntu时选自己分区,一定要选个根目录,即“\”符号的。不然会报错不给下一步。我一开始看漏眼,在这步卡了很久。 安装20.04时一遍过没有报错,但是安装16.04后却无法进入系统,显示我的无引导。感觉网上提供的方法输入指令后仍然无法找到引导项。 之后又学了分区方法,最后尝试发现,如果只有一个基本的根目录“\”加一个交换空间区就解决了
记录下在Ubuntu18中同时安装ROS1&2的主要步骤以及一些小问题,之后遇到新的问题会更新 ROS Melodic 安装源 sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" >
1、前记: 这几天同样在MATLAB官网上学习了些机器人相关的基础知识。看到官方新推出的机器人系统工具箱(Robotics System Toolbox)的功能在很多方面都强于Robotics Toolbox,而且要更好的利用其学习必须结合到ROS一起学习。之前一直犹豫是因为不熟悉ROS和Ubuntu系统,另外想装虚拟机又嫌麻烦,但从长远看十分有必要学习ROS了,想到自己基础薄弱便担心其路途遥远
导言 你也在机器人动力学仿真过程中,遭遇了许多BUG吗? 没关系,在这里或许能找到你想要的答案! 正文 先来考虑一个很简单的情况,假设有一个椭圆形物体放置在水中,其密度与水完全相等,并且通过一个光滑铰链固定,此外,假设水没有阻力。如下图所示: 1 建模 关于这个物体的动力学方程可以列写如下: 其中
转载自:http://emuch.net/html/201009/2407634.html 国外的博士论文很多工作系统性强,条理清晰,是科研者很好的参考资料。可是怎么样能够搜索并下载到fulltext,比如如何利用好Google工具来检索呢,大家来讨论下,各抒己见,互相学习,共同进步吧:) PS:发起话题已经有几天了,大家发言都很中肯,我把各位虫友的意见总结了下
smimport_implementation Invalid file type '.urdf'. Can only import Physical Modeling XML files. 出错 smimport (line 132) [hModel, sDataFile] = smimport_implementation(xmlFile, varargin{ : });
第三方账号登入
看不清?点击更换













")







第三方账号登入
QQ 微博 微信