

上一节 雅可比矩阵
前提: 控制
控制一个机器人就是把目标的位置(Operational Space)转换为关节角的位置(Joint Space)。
1. 用逆向运行学控制 Control with Inverse Kinematics

目标位置 通过逆向运行学解出目标关节角
,再与当前位置
作差得到
,可以使用P/PD/PID控制器计算出所需要的扭矩
,从而控制机器人运动得到下一时刻的关节角
。但是逆向运动学求解太复杂,几乎不会使用这种方法控制机器人。
例如一个有重力补偿的PD控制:
2. 用操作空间和雅可比的逆控制 Operational Space Control with ![[公式]](https://www.zhihu.com/equation?tex=%5Cbf%7BJ%5E%7B-1%7D%7D)
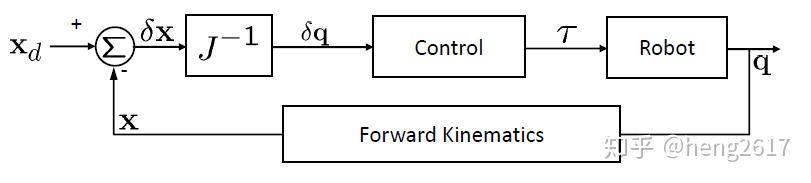
目标位置 与当前位置
作差得到
,(左边)乘以雅可比的逆
得到
,可以使用P/PD/PID控制器计算出所需要的扭矩
,从而控制机器人运动得到下一时刻的关节角
。通过正向运行学又可以解出下一时刻的位置
,再与目标位置
作差得到下一时刻的
,从而开始下一时刻的计算。
3. 分布速度控制 Operational Space Control with --Resolved-Rate Motion Control
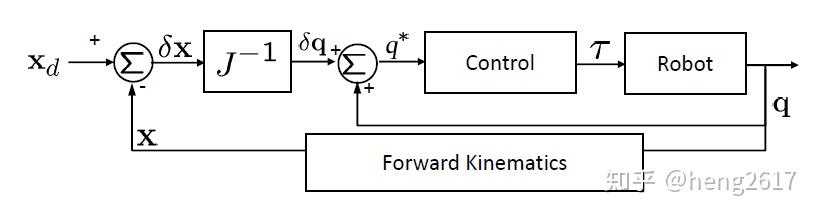
是上一个控制方法的改进。这里关注的速度的变化。这里的*表示所需量,不是测得量。
4. 用操作空间和雅可比的转置控制Operational Space Control with ![[公式]](https://www.zhihu.com/equation?tex=%5Cbf%7BJ%5ET%7D)
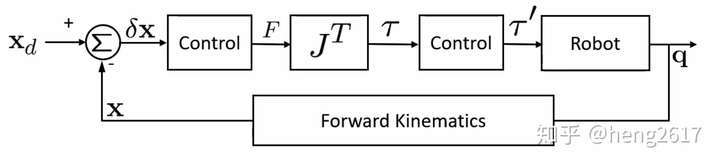
例如一个控制律(Control Law):
其中从 到
是干扰抑制,后面将具体讲述。
下一节:达到临界阻尼


评论(0)
您还未登录,请登录后发表或查看评论