首先了解在导航堆中,move_base包与其它包(如amcl、map_server)的关系,如图所示 在move_base节点运行前需要四个配置文件,这些文件定义了一系列相关参数,包括越过障碍物的代价、机器人的半径、路径规划时需要考虑未来多长的路、我们想让机器人以多块的速度移动等等。这四个配置文件分别是: base_local_planner_params.yaml cos
0x00 为何需要路径规划? 现在我们已经可以构建当前环境地图,可以实现机器人在当前地图中的定位。那接下来就可以在地图上给定目标点,开始规划路径控制机器人移动过去,这样就可以完成在已知地图中进行自动导航的任务了。在已知地图中进行路径规划可以举一个很形象的例子,大家在公园里游玩时,经常需要找特定的游玩地点。例如想要寻找熊猫馆,那么就需要在公园提供的游览地图中首先找自己的定位
0x00 什么是costmap代价地图 在机器人进行路径规划时,我们需要明白规划算法是依靠什么在地图上来计算出来一条路径的。依靠的是gmapping扫描构建的一张环境全局地图,但是仅仅依靠一张原始的全局地图是不行的。因为这张地图是静态的,无法随时来更新地图上的障碍物信息。在现实环境中,总会有各种无法预料到的新障碍物出现在当前地图中,或者旧的障碍物现在已经从环境地图中被移除
0x00 为何需要对机器人进行定位? 要想实现移动式机器人的自动导航需要完成以下六点,当然这些信息是我自己总结的仅供大家参考: (1)一张完整的高精度全局地图,机器人需要在该地图下完成自动导航,这是进行自动导航的必要且重要的前提; (2)机器人在地图的哪个位置上,确定机器人当期位姿,用于确定机器人的起始状态; (3)机器人需要到达的目
本节目标:学习gtsam与isam在二位位姿pose2和三维位姿pose3上的使用,并将isam用于位姿的因子图优化。 预期效果:将ICP匹配带来的瞬间位移变成对之前累积误差的消除。蓝色ICP无图优化,紫色ICP后进行图优化。 程序:https://gitee.com/eminbogen/one_liom test_gtsam里有学习 gtsam,isam的四个程序 图优化学习
第一步:TX2安装ROS kinetic http://www.ncnynl.com/archives/201706/1750.html 第二步:安装激光雷达驱动(测试过rplidar、F4) 首先必须给TX2编译内核,才可读取出雷达,编译方法参考 http://m.blog.csdn.net/gzj2013/artic
视觉SLAM学习【3】-----视觉SLAM通过三角测量和PnP法估计特征点的空间位置目录 一、G2O的安装 1、g2o的下载 2、文件上传ubuntu 3、安装依赖库 4、g2o的编译 二、项目创建 1、创建项目文件夹 2、创建三角测量的cpp文件 3、创建PnP法的cpp文件 4、创建CMakeLists.tx
视觉SLAM学习【2】-----ubuntu16.04基于kitti数据集的SLAM中ORB特征点提取及暴力匹配目录 一、Kitti数据集 1、什么是Kitti数据集? 2、Kitti完整数据集的获取 3、Kitti数据集上传至ubuntu 二、编写kitti数据集的ORB特征点的提取及暴力匹配代码 1、创建cpp格式文件
视觉SLAM学习【1】----基于ubuntu16.04的SLAM中ORB特征点提取及暴力匹配目录 一、ORB特征点提取及暴力匹配定义 1、什么是ORB特征点提取? 2、什么是暴力匹配? 二、进行相关数据准备 1、拍摄图像 2、特征点提取、匹配的文件夹创建 3、在创建的文件夹中新建cpp文件 4
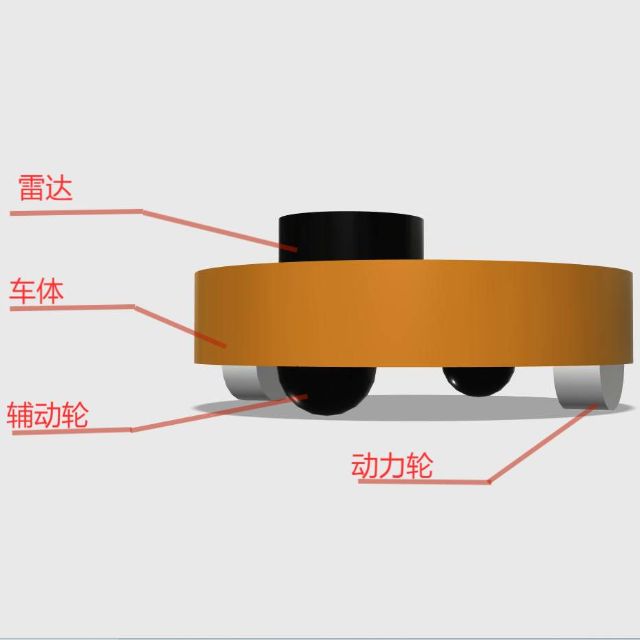
目前为止, 我们都旨在构建一个能够自主运行的机器人,这个就研究方向更加合理的名词应该叫自主移动机器人. 推荐一本个人觉得很不错的书 Ronald C. Arkin - 2011- Introduction to Autonomous Mobile Robots. 本文的主要目的是先把框架搭起来, 采用原型模式, 然后在此基础上循环的进行深化, 望能够起到抛砖引玉的作用. Pa
SLAM:同时定位和建图(Simultaneous Localization and Mapping)。 机器人从未知环境中的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。 一般传感器:激光雷达,相机(单目,双目,RGBD,事件)
1、GPS定位 GPS卫星在空中连续发送带有时间和位置信息的无线电信号,供GPS接收机接收。由于传输的距离因素,接收机接收到信号的时刻要比卫星发送信号的时刻延迟,通常称之为时延,因此,也可以通过时延来确定距离。卫星和接收机同时产生同样的伪随机码,一旦两个码实现时间同步,接收机便能测定时延;将时延乘上光速,便能得到距离。由于尚未对因“卫星时钟与接收机时钟同步误差”等影响加以改正,在所测距离中包含着
文章目录 GridCells概述 OccupancyGrid使用注意事项 创建工程 在Rviz中实时现实栅格地图 结束语 GridCells概述 GridCells是另外一种创建栅格地图的方法,与nav_msgs::OccupancyGrid栅格地图不同的是: 1.GridCells栅格地图使用(x,y,z)表示被占用
本系列文章主要介绍基于A*算法的路径规划的实现,并使用MATLAB进行仿真演示。本文作为本系列的第三篇文章主要对前两篇文章总结以及对前文中的 A * 算法进行进一步的优化处理 本系列文章链接: ----------------------------------------------------------------------------- 详细介绍用MATLAB实现基于 A *
EVO使用教程 1 EVO环境安装 1.1 二进制安装 1.2 源码安装 2 使用方法 2.1 TUM数据集上使用 2.1.1 计算轨迹的绝对误差(evo_ape) 2.1.2 绘制多条曲线(evo_traj) 2.1.3 分析多条曲线(evo_res) 2.3 KITTI数据集上使用
准备工作 因为最近想抽空学一下SLAM相关的东西,就打算开个博文记录一下自己的学习过程,同时也希望对有需要的同学能起到一些帮助。 说到SLAM,即同时定位与建图,目前有很多种实现方法,主流的便是激光SLAM(配合激光雷达)和视觉SLAM(配合视觉传感器)。其中视觉SLAM又包括单目SLAM、双目SLAM和RGBD SLAM等,每种类型下面又有很多实现框架,暂时就不一一阐述了
1、前言 前一段时间看过我文章的都知道,我打算写一个SLAM源码阅读的文章,然后,我就去读了Gmapping的源码,感受良多,不足的地方是源码太乱了,阅读起来真的不香。于是就有了这篇文章,在我仔细阅读之后,我在源码的结构基础之上,进行大刀阔斧的删减和更改之后得到一个易于阅读的建图算法功能包,极大的降低了代码量,极大的提升了阅读体验。在这里将该算法功能包分享给大家,希望需要的朋友,善待它。
8.sliding window 8.1 理论基础 实际上,这一部分跟后端非线性优化是一起进行的,这一部分对应的非线性优化的损失函数的先验部分。理论基础部分的代码基本在第7章部分。 8.1.1 上一次非线性优化结束,最后的H矩阵就是本轮非线性优化的先验矩阵的前身。 8.1.2 构造先验矩阵 (1)移动需要marg掉的pose和路标点 对应的,J矩阵的一些列需要删除掉;H矩阵
7.2 代码 在estimator.cpp的processImage()的最后,代码如下: else//solver_flag = NON_LINEAR,进行非线性优化 { solveOdometry(); //<--1 //边界判断:检测系统运行是否失败,若失败则重置估计器 if (failu
7.后端非线性优化 7.1 理论基础 7.1.1 bayes模型,因子图和最小二乘 这一部分主要是对董靖博士在公开课《因子图的理论基础》上的回忆和总结。 (1)bayes模型 假设有黄色是机器人在不同时刻的位姿,蓝色是机器人观测到的路标点,红色是机器人对路标点的观测,绿色是机器人对自身运动的观测。 那么,这个过程可以用下面这个baye
第三方账号登入
看不清?点击更换
























第三方账号登入
QQ 微博 微信