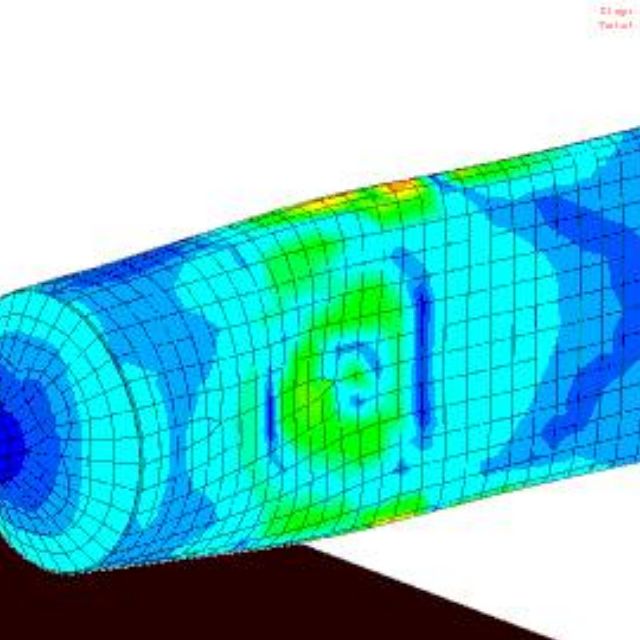
本文,我们将看一下abaqus空气弹簧(图1)的模拟。该设备可用于隔振和悬架,例如在重型车辆应用中。 图1:空气弹簧 abaqus2017安装教程此处显示的示例由一个波纹管状的皮囊(两个波纹管)组成,每个端部都有钢板。波纹管由橡胶制成,并用纤维增强。钢制的箍环在充满压缩空气时有助于保持其形状。 与机械板簧或螺旋弹簧相比,空气弹簧具有可调的优势:通过改变空气弹簧内部的压力,弹簧特性
本文主要介绍一下Abaqus如何在结果后处理实现输出结果的多样化,使得结果输出更加多元更加直观,具体来说就是如何使用Overlay Plot实现类似图层的操作,将多个结果组合输出。 拿一个简单的例子说明,在计算获得odb结果之后,我们希望输出曲线和结果云图整合在一起的动画和图片,效果如图所示。 创建步骤: 1) 结果可视化界面abaqus cohesive,设置好需要的参数结果图,本例为
前言 robocup2D 是一个仿真机器人足球比赛,也是一个研究多智能体强化学习等机器学习理论算法的优秀平台,在接下来的一段时间,通过学习如何在robocup2D仿真比赛中运用机器学习算法,提高一个球队底层的实力。 本文将在ubuntu16.04系统中搭建robcup2D开发环境,因为手中只有15版本的开发环境,但是在安装中与在ubuntu12.04的环境搭建过程有一些不同。本文介
文章目录一、实现电流闭环二、实现转矩闭环三、实现速度闭环四、波形分析 Simulink永磁同步电机控制仿真系列文章已经发布两篇,每篇文章都开源simulink仿真模型。在此抄录前两篇文章地址,供有需要的朋友查阅。Simulink永磁同步电机控制仿真系列一:让电机动起来Simulink永磁同步电机控制仿真系列二:闭环控制前的准备工作 一、实现电流闭环本次实验在第二篇文章的基础上进行,Simuli
HybridAstar是一种带有半径约束的路径平滑规划算法,算法思想来自A*算法,但A*是没有考虑平滑和半径约束的路径规划算法,且基于栅格地图的网格搜索算法,它们的目标代价函数是为了形成一条路径最短的无碰撞路径。而HybirdAstar是在二者的基础上加入半径约束,进行路径不同曲率方向采样,同时采用reedsheep曲线,进行目标点的衔接,来加速路径的生成效率。 1. A*算法原理 A*算
目前,机器人在工作中需要与环境或用户发生交互影响,比如波士顿Atlas,康复外骨骼,手术机器人,以及协作机器人等。这种应用场景下,单纯的位置控制不能满足要求,它容易使机器人与外界发生强烈的抵触,进而容易使机器人伤害到用户,也伤害到机器人本身。力控(或柔顺控制)应运而生。 任赜宇:为什么我们在机器人运动控制中一直在强调力控?(Force/Torque Control)390 赞同 · 48 评论文
Power PMAC中运动程序的编写 —— 上0. 说明1. Power PMAC与驱动器的的连接2. Power PMAC中Project的结构树介绍(重要!)3. 硬件在控制器中的配置(重要!!)4. 在线命令介绍5. 参数和变量定义5.1 变量声明的关键字5.2 变量声明的示例5.3 特殊数值的表示6. 运算符的使用7. 程序语法whileifswitchgoto8. 后记声明前记: 在编
前言 写这篇文章主要是为了梳理下自动控制原理的脉络,便于系统地学习控制理论的知识,并且探讨一下自动控制原理的应用,而不是毕业的目标就局限于互联网企业。一个自动化人的目标应当是星辰大海! 起源 中国古代记载的指南车和木牛流马 1788年瓦特为控制蒸汽机速度而设计的离心调节器 1868年麦克斯韦对系统的稳定性进行分析 随后源于物理学和数学的自动控制原理开始逐步形成[2]。 发展 :
双目立体视觉测量中,立体匹配(对应点的匹配 )是一项关键技术,对极几何在其中起着重要作用。双目立体视觉系统中,有两个摄像机在不同角度拍摄物理空间中的一实体点,在两副图像上分别有两个成像点。立体匹配就是已知其中的一个成像点,在另一副图像上找出该成像点的对应点。这样可以加快匹配的速度。 经典图 从上图看,如果得到三维点P在I1上的投影点如果是P1的话,那这个点在I2上的投影,一定会是在
文章目录1、搭建模型2、运行仿真3、分析结果永磁同步电机控制笔记:clark变换park变换示意图中提到,在dq坐标系中,实现了对永磁同步电机的转矩电流和励磁电流解耦控制,也就是说,控制d轴电流就是控制磁场强弱,控制q轴电流就是控制转矩大小。 1、搭建模型直接控制d轴q轴电流较为麻烦,出现问题不易分析,而相比较控制电流,控制电压复杂度大大降低。根据经验,增大电压,电流会增大,减小电压,电流会减小
目前在人机交互类场合,主流的方案都是在机器人的结构上引入力矩传感器或SEA等易于检测用户力矩的方式,通过控制算法实现柔顺控制效果。机器人在于人交互时,拥有碰撞检测与拖动示教功能,提升用户的体验。 人机交互中重要的是预测用户的自主力矩。人机交互的实现既然可以在“机”上做工作,同样我们也可以通过“人”的一侧实现,毕竟自主力的来源是人。一般地,我们收缩肌肉时,皮肤表面会产生一种电生理信号——肌电信
一、Lattice Planner简介 二、Lattice规划算法实现过程 三、Lattice Planner轨迹采样 四、Lattice Planner速度规划 五、轨迹生成及轨迹评价函数 Lattice Planner简介 LatticePlanner算法属于一种局部轨迹规划器,输出轨迹将直接输入到控制器,由控制器完成对局部轨迹的跟踪控制。因此,Lattice Pl
第三章、让小车动起来 1►配置controller 在tianracer_description功能包新建config文件夹时,我们可以通过一个yaml文件smart_control_config.yaml来声明我们所需要的controller,以及对应的参数,PID增益和 控制器设置必须保存在
Power PMAC运动控制器——学习笔记1说明1. 硬件介绍2. 准备工作3. PMAC与上位机的连接4. 创建自己的伺服控制项目5. 程序下载流程6. 学习途径后记 有很多朋友跟博主一样,拿到PMAC控制器后一脸懵逼,技术只给了几个英文手册,便什么都不管了,咨询问题的时候敷衍了事。为了避免更多朋友像博主一样,决定跟大家分享一下Power PMAC运动控制器的使用经验。 项目结题
本文实现了让永磁同步电机在发电机状态工作,对电机的部分信号进行了说明,观察验证了电机反电动势,根据电机的反电动势波形计算了电机的极对数,分析了电负载变化时对电机反电动势的影响,以及产生影响的原因。文章目录1、先让电机动起来1.1、导入一个永磁同步电机1.2 、接下来对模块进行配置1.3、让电机动起来2、分析运行状态2.1、引出m端口信号2.2、计算电机极对数2.3、验证反电动势参数2.4、当负载发
这一部分主要参考B站老王同志的贝叶斯滤波部分,贴上链接,建议多多支持老王成果 贝叶斯滤波与卡尔曼滤波第七讲 卡尔曼滤波_哔哩哔哩 (゜-゜)つロ 干杯~-bilibiliwww.bilibili.com/video/BV1HT4y1577g/?spm_id_from=333.788.recommend_more_video.-1 先概括一下本部分需要介绍的内容: (1)贝叶斯滤波思想与卡尔
其实上一篇已经推导了相关公式,这一篇主要是总结一下 两种思路(控制与概率)对于状态估计的理解从本质是一致的,无论是预测 + 更新 还是 预测 + 修正 其实都是一个意思 这种在线迭代的思路也是构成贝叶斯滤波的基本实施过程,而将这种思路合在一起,就是接下来要介绍的卡尔曼滤波 通过上面的一些介绍,主要是需要理解这种思想,总结就是以下三个框 而老王大佬在介绍完贝叶斯滤波后,给出了
这一部分主要参考B站老王同志的贝叶斯滤波部分,贴上链接,建议多多支持老王成果 贝叶斯滤波与卡尔曼滤波第六讲 随机过程的贝叶斯滤波(贝叶斯滤波完结)_哔哩哔哩 (゜-゜)つロ 干杯~-bilibiliwww.bilibili.com/video/BV1Y741127cu 1. 概率论基础 首先介绍的是频率学派与贝叶斯学派 个人理解是这样的: 频率学派认为参数是固定的,而观测是随机变量
1. 状态估计概述 为啥需要状态估计?因为机器人学中存在很多方面的不确定性 从更大方面来说,机器人由于不确定性从而引申出来最优估计(参数估计与状态估计)这个话题 在这个专栏中仅考虑状态估计,我们将从两个方面来讨论机器人状态估计 2. 控制基础 从上图中我们可以知道机器人控制整个架构图,而研究机器人控制也有两个方面的话题(《自动控制原理》中基于Laplace变换的经典控制,《现代控
PMAC应用八-SDK的使用2 主窗口 主窗口介绍 利用终端进行PMAC的控制 终端的使用 运动控制窗口 窗口的实现 FTP文件操作 FTP窗口 FTP文件操作 结后语 主窗口 主窗口介绍 这里我们只讲FTP文件上传和异步通讯的使用,其他的都是C#的操作。PMAC所有的功能都可以通过终端就行操作,就像上一节演示的小案
第三方账号登入
看不清?点击更换

























第三方账号登入
QQ 微博 微信