全文目录 什么是RQT? 一个RQT Plugin的工程目录 各文件详细说明 程序运行逻辑 编写RQT插件的具体操作步骤 4 程序运行逻辑 运行顺序: scripts/rqt_mypkg >> src/rqt_mypkg/mypkg.py >> src/rqt_mypkg/mypkg_widget.py 5 编写RQ
快速随机搜索树(Rapidly-Exploring Random Tree, RRT)算法是移动机器人或机械臂常用的轨迹规划算法,用于规划出一条运动轨迹。其主要步骤分以下几步: 1. 初始化需要规划的2D或3D地图,给出移动机器人或机械臂要运动的起点和终点坐标,树的根部在起点。 2. 开始搜索并构建树。树的构建过程为:a) 首先在地图上随机选一点Prand;b) 遍历树上所有的点,从书
全文目录 什么是RQT? 一个RQT Plugin的工程目录 各文件详细说明 程序运行逻辑 编写RQT插件的具体操作步骤 1 什么是RQT? RQT是ROS中一个基于QT的GUI开发框架, 在这个框架内可以搭载许多GUI小应用, 这些小应用也被叫做rqt_plugin. 利用这个框架就可以在同一个界面内组合多个小应用, 然后打造属于自己的个性化界面,
参考代码:https://github.com/christianwengert/calib_toolbox_addon 所谓手眼系统,就是人眼睛看到一个东西的时候要让手去抓取,就需要大脑知道眼睛和手的坐标关系。如果把大脑比作B,把眼睛比作A,把手比作C,如果A和B的关系知道,B和C的关系知道,那么C和A的关系就知道了,也就是手和眼的坐标关系也就知道了。 &
导言 你也在机器人动力学仿真过程中,遭遇了许多BUG吗? 没关系,在这里或许能找到你想要的答案! 正文 先来考虑一个很简单的情况,假设有一个椭圆形物体放置在水中,其密度与水完全相等,并且通过一个光滑铰链固定,此外,假设水没有阻力。如下图所示: 1 建模 关于这个物体的动力学方程可以列写如下: 其中
1. 原理 1.1 AB相编码器 AB相编码器,简而言之,就是有两路输出的脉冲信号,通过对脉冲计数,可以知道转动了多少角度。 读取编码器的数据也就是要让单片机对脉冲计数。 1.2 定时器的编码器模式 下面是我从STM32F4的中文数据手册中 “通用定时器” 一节摘取出来的片段。 STM32系列的定时器自带有编码器的功能,并且还能通过TIMx_CR1的DIR位自动判断正反转,可
上期回顾: RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1) RT-Thread智能车目标识别系统连载教程——训练卷积神经网络模型(2) RT-Thread智能车目标识别系统连载教程——运行卷积神经网络模型(3) RT-Thread智能车目标识别系统连载教程——Darknet 训练目标检测模型(4) 引言 这篇文档主要介绍 RT-Thread 如何
上一回,我们讲完了A*的工作原理,与Dijkstar相比A*确实有一定程度上的优化,但是我们最后也提到了,即便如此A*和Dijkstar一样,依旧还是在逐一遍历地图中的每一个栅格,这对于算法的实际使用是十分不友好的,毕竟我们不可能使用一张20*20或者100*100的地图来描述实际的物理世界,往往实际上的地图是会远远大于这个尺寸的。 在座的小伙伴们一定知道在概率统计中,有一个概念叫做抽样调查,
源代码的问题,本文就不啰嗦了,大家参考正点原子的MPU6050例程即可。MPU9150和MPU6050用一模一样的代码就可以。 本文只罗列在DMP使用过程中遇到的坑和解法。 问题1:MPU6050的AD0引脚接了3.3V,器件地址在程序中设置了是0X69,但是初始化不成功? 首先,一般的初始化代码大致如下: //初始化MPU6050 //返回值:0,成功 // 其他,错误代码 u
原理 对于ROS里面用Python写的节点,是可以直接用 python your_node_name 这句话运行的,所以只要我们设置好了PYTHONPATH的依赖路径,就可以用Pycharm来调试ROS的节点. 操作步骤 1 打开终端 2 加载ROS环境变量,以及当前工作空间的环境变量 source /opt/ros/k
本文介绍了如何利用MATLAB辨识状态空间方程中的未知参数。 假设我们的被控系统的表达如下: 我们想要通过实验数据辨识出参数K1和K2,方法如下: 第一步,采集实验数据。 需要的数据包括系统一段时间内的系统输出Y(ts),以及控制量U(ts),这些数据应该是以某个固定的采样频率进行采集得到的。另外,最好是要采集系统的初始
上期回顾: RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1) RT-Thread智能车目标识别系统连载教程——训练卷积神经网络模型(2) RT-Thread智能车目标识别系统连载教程——运行卷积神经网络模型(3) 前言 这篇文档会介绍如何用 darknet 训练一个 YOLOv2 目标检测模型,看完这篇文档会发现:模型训练和预测都非常简单,最花时
1.学校简介 武汉工商学院创建于2002年,是经教育部批准的全日制普通本科高校。经过十余年建设,跻身国内同类高校前列,被教育部授予“全国深化创新创业教育改革示范高校”“2018年度全国创新创业典型经验高校”称号;入选“全国党建工作标杆院系”和“全国党建工作样板支部”;成为第45届世界技能大赛货运代理项目中国集训基地、AACSB国际商学院协会会员、湖北省首批高等学校创新能力提升计划(“2011计划
转载自:http://emuch.net/html/201009/2407634.html 国外的博士论文很多工作系统性强,条理清晰,是科研者很好的参考资料。可是怎么样能够搜索并下载到fulltext,比如如何利用好Google工具来检索呢,大家来讨论下,各抒己见,互相学习,共同进步吧:) PS:发起话题已经有几天了,大家发言都很中肯,我把各位虫友的意见总结了下
马斯克的龙飞船中的操作系统是Linux,软件工程使用的是C++,用GCC和GDB去调试代码,C++如此强大和灵活,所以有必要了解一下C++工程是如何make的. 我们在写CMakeLists.txt时候需要查找第三方库的头文件和库文件,通常直接是执行 find_package(xxx) 然后就会有对应的 ${XXX_INCLUDE_DIRS}和${XXX_LIBRARIES}
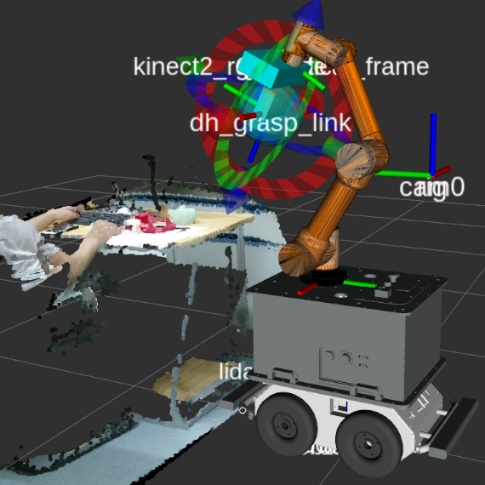
随着3D相机的普及和3D激光传感器价格的降低,机器人依靠3D传感器视觉避障和路径规划方案逐渐成为趋势。 近期采用3D相机进行了路径规划的仿真和实测。 蓝色路标点表示机器人需要经过的waypoints 机器人眼中的世界 黄线为机器人深度相机视角,黑色为未知区域,绿色为障碍物,蓝色为空闲区域 膨胀后的局部地图 机器人逐渐靠近目标物
关于大佬们的一些见解 下面是引用知乎的一段文字: 我们从单目视觉说起。平时我们都说要做视觉识别、测量云云,然后我们就会去拍照,再对数字图像做各种处理,颜色处理、灰度化、滤波、边缘检测、霍夫变换,最后得到了希望得到的特征,是这样的对吧? 不过请注意!到了这一步,其实我们仅仅是得到了一坨坨感兴趣的像素而已!究竟要怎样才能把这些像素转化到现实世界的对象中呢?也就是说,
课程目的 ROS使用过程中,涉及许多命令和终端的操作,虽然有Rviz做显示,但依然没办法充分满足多种多样的需求,那不如开发一款集成各种自定义功能的可视化软件吧! 古月居推出“如何开发一个ROS人机交互软件”系列,分成三门课程灵活学习,在ROS环境下利用QtCreator工具开发一款人机交互软件,包括librviz库开发、速度仪表盘显示、订阅并显示图像话题等功
一阶贝塞尔曲线(包含两个控制点) 假设控制点为P0和P1,曲线方程为: 其中t∈[0,1]。 这个方程可以理解为,从P0出发,朝着P1的方向前进||P_1-P_0||t的距离,从而得到了点B(t)的位置。 另外,之所以是一阶贝塞尔曲线是因为方程是关于t的一阶多项式。 二阶贝塞尔曲线(包含三个控制点) 设控制点为P0,P1和P2,曲线方程为: 其中t∈[0,1]
想玩全向小车么?想搭建一个移动底盘么?想满足中二病的创造欲么? 想? 那么为什么不自己做一个麦克纳姆轮呢? 自己动手丰衣足食! 0. 准备材料: 3D打印机一台 打印耗材 直径2mm,长度60mm的铁轴 这种玩具模型里用的小铁轴刚好可以用来当麦克纳姆轮的车辊轴 硅胶热缩管 内径16mm 硅胶热缩管在这里
第三方账号登入
看不清?点击更换


















第三方账号登入
QQ 微博 微信