前言 本次项目所用到的四轮小车模型如下 该四轮小车的模型搭建过程请阅读我的上一篇文章:https://blog.csdn.net/cyj972628089/article/details/107009528(Webots学习笔记—四轮小车的模型搭建和简单控制) 距离传感器的介绍 本项目用到的是Base nodes下的DistanceSensor节点,关于这个节点的详细介绍请大家自行查阅
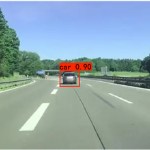
迁移学习(图像分类) 在本教程中,您将学习如何使用迁移学习训练卷积神经网络以进行图像分类。您可以在 cs231n 上阅读有关迁移学习的更多信息。本文主要目的是教会你如何自己搭建分类模型,耐心看完,相信会有很大收获。废话不多说,直切主题…首先们要知道深度学习大都包含了下面几个方面:1.加载(处理)数据2.网络搭建3.损失函数(模型优化)4 模型训练和保存把握好这些主要内容和流程,基本上对分类模型就
一、约束条件 作用:限制字段赋值 约束条件 默认值也可设置为 " ",表示0个字符,不为空 Null列下显示YES是表示可以赋空值,NO时表示不可以赋空值 null 允许为空(默认设置) not null 不允许为null(空) key 建值类型 default 设置默认值,缺省为null extra 额外设
自启动服务配置 操作环境及软硬件配置如下: - OriginEye 智能相机 - PC:Ubuntu (≥20.04) + ROS2 (≥Foxy) + VSCode 在机器人开发过程中,开发者经常有一个诉求,机器上电启动后自动执行某些程序,而不需要进入终端敲入一些指令后再执行。 自启动服务配置就可以帮助我们完成这样一件事。接下来以开机让OriginEye上的绿灯以1s的
*课程资料请在微信公众号“古月居”后台回复“仿真控制资料”获取 该课程已开通专门交流答疑区《MATLAB+ROS快速开发控制算法》课程答疑汇总(https://www.guyuehome.com/Bubble/circleDetail/id/30) 课程目的 MATLAB/Simulink有图形化编程的特点,程序设计与手写设计的流程图十分相似,利用MATLAB/Simulink可以快速实
PaddleOCR手写文字识别 一. 项目背景 二. 环境配置 三. 数据构造 四. 模型微调 五. 串联推理 六. 注意事项 七. 参考文献 光学字符识别(Optical Character Recognition, OCR),ORC是指对包含文本资料的图像文件进行分析识别处理,获取文字及版面信息的技术,检测图像中的文本资料,并且识别出文本的内容。 PaddleOC
语音识别之HTK重理解 趁着没开学,今天把语音识别中的隐马尔可夫模型相关训练重新跑了一遍,结合网络大佬的经验,对HTK工具的继续运行深入理解,重新训练了数据,并结合实际进行了更新和完善。 环境问题我就不说了,我默认已经是配置好的了。今天还是孤立词,内容呢是one,two,three,当然,后面自由发挥首先进行数据的采集 rec -b 8 data/train/speech/01.wav r
前言 RGB色彩空间是一种被广泛接受的色彩空间,但是该色彩空间过于抽象,我们不能够直接通过其值感知具体的色彩。我们更习惯使用直观的方式来感知颜色,HSV色彩空间提供了这样的方式。通过HSV色彩空间,我们能够更加方便地通过色调、饱和度和亮度来感知颜色。 其实,除了HSV色彩空间,我们讨论的其他大多数色彩空间都不方便人们对颜色进行理解和解释。 基础知识 HSV色彩空间从心理学和视觉的角度出发,
今天的任务是教会大家利用Matlab对大肠杆菌细胞进行计数这是一个非常基础的图像任务,利用Matlab能够快速的实现。 让我们,先看看我们今天要处理的图像长什么样子: 看上去,很乱很复杂哈,有没有!其中绿色部分为大肠杆菌,红色部分为其他杂质。 去除红色杂质细胞 在这里我们的思路是将原图转换到HSV空间,新建一个黑色背景,将绿色的大肠杆菌复制到黑色背景里面。 Ecoli_hsv = r
1.MySQL数据类型 1、常见信息种类 2、字符类型 2.1、定长:char(字符个数) 2.2、变长:varchar(字符个数) 2.3、大文本类型blob、text 3、数值类型 3.1、整数型 3.2、浮点型 4、日期时间类型 5、枚举型 1、常见信息种类 数值型:体重、身高、成绩、工资 字符型:
1、什么是BCD码? BCD码是一种2进制的数字编码形式,用4位2进制数来表示1位10进制中的0~9这10个数。这种编码技术,最常用于会计系统的设计里,因为会计制度经常需要对很长的数字做准确的计算。相对于一般的浮点式记数法,采用BCD码,既可保存数值的精确度,又可使电脑免除作浮点运算所耗费的时间。此外,对于其他需要高精确度的计算,BCD编码也很常用。 常见的BCD码有很多种形式,比如8421码
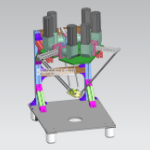
本篇文章是经过作者はるなし的授权,进行转载编辑,感谢はるなし给我们贡献了一篇很好的开箱文章。 引言HI,我是はるなし。我是一名医学生,喜欢制作机器人和人工智能。这次我购买了一款机械臂,所以我想写一篇关于它的开箱测评文章。虽然有很多关于myCobot 280的文章,但是关于我这一款机械臂的信息很少,曾经我在购买时也非常犹豫。我认为拥有myCobot 280的人可能会考虑购买320,所以我写了这篇文章
什么是模块化设计 FPGA/IC设计中根据模块层次的不同有两种基本的设计方法: 自下而上方法对设计进行逐次划分的过程是从基本单元出发的,设计树最末枝上的单元是已经设计好的基本单元,或者其他项目开发好的单元或者IP。该方法先对底层的功能块进行分析,然后使用这些模块来搭建规模更大的功能块,如此继续直至顶层模块。 自上而下的设计是从系统级开始,把系统分为基本单元,然后再把每个单元划分为下一层次
大家好,我是虎哥,从今天开始,我将花一段时间,开始将自己从ROS1切换到ROS2,在上一篇中,我们依托Turtlesim演示节点来逐步展开,介绍了rqt工具,这一章,我们将围绕ROS2中主要的概念“节点”展开,了解ROS 2中节点的功能以及与之交互的工具 。 目录 The ROS 2 graph 一、ROS2中节点(Nodes in ROS 2) 先决条件 1、ROS2 RUN 2、
今天我们来手撕一个常见的笔试题:模3检测,使用的方法是三段式Moore状态机。 题目描述: 输入端口是串行的1bit数据,每个时钟周期进来一位新数据后,实时检查当前序列是否能整除3,若能则输出1,否则输出0。 例如,在4个时钟周期依次输入的数据为1、1、0、1。则有: T1:数据序列为1(10进制的1),不能为3整除,所以输出flag = 0; T2:数据序列为11(10进制
大家好,我是虎哥,从今天开始,我将花一段时间,开始将自己从ROS1切换到ROS2,在上一篇中,我们Jeston TX1 核心模块,JetPack_4.6.3刷机后环境中安装了 ROS2 eloquent版本,并完成了初步的验证,这一章,我们依托Turtlesim演示节点来逐步展开。 Turtlesim是用于学习ROS 2的轻量级模拟器。它说明了ROS 2在最基本的层面
FactoryBean是一个接口,创建对象的过程使用了工厂模式。 一、基本使用 让Spring容器通过FactoryBean来实现对象的创建。 创建FactoryBean案例 public class SimpleFactoryBean implements FactoryBean<Cat> { @Override public Cat getObj
嵌入式开发–获取STM32产品系列和容量信息 获取STM32产品系列 有时候我们需要知道当前MCU是STM32的哪一个系列,这当然可以从外部丝印看出来,但是运行在内部的软件如何知道呢? ST为我们提供了一个接口,F1和G4系列地址统一为:0xE004 2000,需要以32位方式读取。 H7系列的地址是0x10006450 对于F1系列,该说明如下: 对于G4系列,说明如下:
SVPWM空间矢量脉宽调节 这张图是基于α和β坐标系,也就是定子磁场坐标系,图中的Uout就是定子磁场的空间矢量,它的角度表示定子线圈产生磁场的方向,长度表示磁场的强度,以电机匀速旋转为例,FOC控制的目标就是让这个矢量的长度保持不变,角度匀速变化。 图上以60度为间隔,划分了6个区,其意义类似于6步换向,也就是在不同的区域,相应的开启或关闭相应的驱动桥的上下臂,以及上下臂的导通时间,来实
大家好,我是虎哥,从今天开始,我将花一段时间,开始将自己从ROS1切换到ROS2,在上一篇中,我们再虚拟机环境中安装了 ROS2 eloquent版本,并完成了初步的验证,但是做为一个偏硬件的博主,我还是以在嵌入式设备中使用为主,所以专门适配一次我一直使用的平台Jeston TX1上,安装ROS,并测试验证,希望对大家有所帮助,同时也是我踩坑,填坑的过程。 目录 一、硬件平台和测试环境说明
第三方账号登入
看不清?点击更换



















第三方账号登入
QQ 微博 微信