Movebase的源码安装 Movebase源码位于Navigation包中,大家可在Git官方代码包中进行安装 cd ~/catkin/src git clone https://github.com/ros-planning/navigation.git 亦可直接 sudo apt-get install ros-kinet
文件讲解 Gazebo中进行算法仿真首先需要启动世界模型,通过launch文件实现模型与代码的交互,launch文件中整合了world文件和其他launch文件使其同时运行在Gazebo中;world文件是整合模型的文件,可以直接调用模型或者直接编写模型相关的参数;Models文件则是构建每个子模型的文件。三者关系如下图所示: Models 文件
适合人群 无人机开发基础入门(三维仿真方向),做无人机路径规划/视觉算法开发。 课程目的 通过本课程提供的完整代码框架,在没有真实的无人机条件下,你将学到PX4无人机三维仿真开发,包含智能无人机开发仿真环境搭建,无人机自主飞行初步,无人机激光雷达避障自主飞行,方便大家做进一步的智能开发,涉及路径规划,自主决策等。在这个基础上实现强化学习
以下安装流程完全参考官方wiki:http://wiki.ros.org/noetic/Installation/Ubuntu 首先设置源: sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.li
在学习ROS的过程中,有一步是永远也省不了的,那就是搭建ROS环境。回忆当年,起初我是用的虚拟机进行安装学习,但是会有各种各样驱动上的bug,网络配置也会有一些问题,感觉附加问题比较多。之后便改用双系统,然而第一次安装双系统的时候,也是遇到了一些问题,分盘、引导之类的也都是不得不去踩的坑,而且双系统存在一定的安全问题,有可能两个系统都挂掉。那么就没有更好的选择了吗?有的,那就是ROS2GO。
前几篇文章中分别讲了如何在gazebo中加载多机器人,在gazebo中多机器人的编队以及如何在rviz中实现多机器人仿真。这一篇文章的主要内容是将前几篇文章所讲内容做一个集合,实现在ROS环境下的多机器人导航加编队的仿真。 1.自主导航+编队框架 前两篇文章已经分别介绍了移动机器人自主导航以及多移动机器人编队的软件框架。这一节介绍如何将其二者结合,思路为将领航者作为自主导航的机器人,跟随者在保
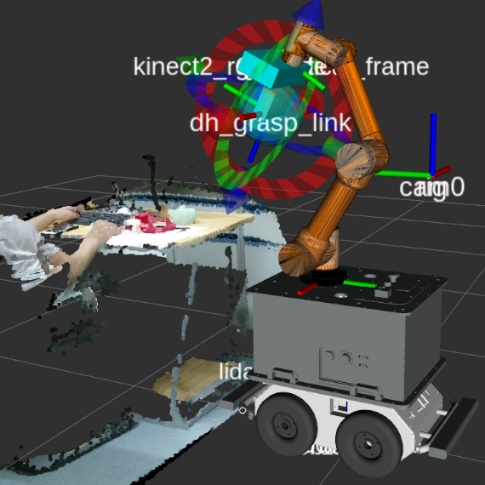
前面的文章分别介绍了如何在Gazebo中实现多机器人仿真以及多移动机器人编队的研究。在ROS中,rviz也是开发者们常用到的一款数据可视化工具。ROS中有很多的数据,包括地图数据、图像数据等,数据形态往往不利于开发者感受其描述的内容,所以常常需要将数据可视化显示,Rviz就是针对可视化需求的一款显示多种数据的一款三维可视化平台——Rviz。Rviz可以很好的兼容各种基于ROS框架的机器人平台,机器
上一篇文章《如何在gazebo中实现多机器人仿真》,介绍了如何在仿真环境gazebo中同时加载多个机器人,并且实现同时控制或单独控制。而在gazebo中加载多个机器人仅仅是多智能体协同控制研究的第一步,这次的文章将介绍如何在ROS操作系统下,gazebo仿真环境中实现基本的多机器人编队控制仿真。 1.领航者-编队者编队原理介绍 多移动机器人编队主要需要解决两个问题,即多机器人编队队形的形成和队
经常有小伙伴在古月居后台咨询ROS安装和上手使用的问题,相信使用过ROS的同学们都深有体会吧: 1.rosdep为啥总是报错,换网、换源、换电脑,怎么都解决不了? 2.ros安装也太慢了吧,看着不到KB级的下载速度,感觉要到天荒地老? 3.找不到包!找不到文件!rosrun和roslaunch为什么运行就说找不到! 4.用虚拟机慢,装双系统难,到底要我怎样? .....
全文目录 什么是RQT? 一个RQT Plugin的工程目录 各文件详细说明 程序运行逻辑 编写RQT插件的具体操作步骤 4 程序运行逻辑 运行顺序: scripts/rqt_mypkg >> src/rqt_mypkg/mypkg.py >> src/rqt_mypkg/mypkg_widget.py 5 编写RQ
全文目录 什么是RQT? 一个RQT Plugin的工程目录 各文件详细说明 程序运行逻辑 编写RQT插件的具体操作步骤 1 什么是RQT? RQT是ROS中一个基于QT的GUI开发框架, 在这个框架内可以搭载许多GUI小应用, 这些小应用也被叫做rqt_plugin. 利用这个框架就可以在同一个界面内组合多个小应用, 然后打造属于自己的个性化界面,
原理 对于ROS里面用Python写的节点,是可以直接用 python your_node_name 这句话运行的,所以只要我们设置好了PYTHONPATH的依赖路径,就可以用Pycharm来调试ROS的节点. 操作步骤 1 打开终端 2 加载ROS环境变量,以及当前工作空间的环境变量 source /opt/ros/k
马斯克的龙飞船中的操作系统是Linux,软件工程使用的是C++,用GCC和GDB去调试代码,C++如此强大和灵活,所以有必要了解一下C++工程是如何make的. 我们在写CMakeLists.txt时候需要查找第三方库的头文件和库文件,通常直接是执行 find_package(xxx) 然后就会有对应的 ${XXX_INCLUDE_DIRS}和${XXX_LIBRARIES}
课程目的 ROS使用过程中,涉及许多命令和终端的操作,虽然有Rviz做显示,但依然没办法充分满足多种多样的需求,那不如开发一款集成各种自定义功能的可视化软件吧! 古月居推出“如何开发一个ROS人机交互软件”系列,分成三门课程灵活学习,在ROS环境下利用QtCreator工具开发一款人机交互软件,包括librviz库开发、速度仪表盘显示、订阅并显示图像话题等功
想玩全向小车么?想搭建一个移动底盘么?想满足中二病的创造欲么? 想? 那么为什么不自己做一个麦克纳姆轮呢? 自己动手丰衣足食! 0. 准备材料: 3D打印机一台 打印耗材 直径2mm,长度60mm的铁轴 这种玩具模型里用的小铁轴刚好可以用来当麦克纳姆轮的车辊轴 硅胶热缩管 内径16mm 硅胶热缩管在这里
Qt Creator for ROS 如果想在Qt上进行ros包的开发和GUI界面开发,建议采用下面的方法。https://ros-qtc-plugin.readthedocs.io/en/latest/_source/How-to-Install-Users.html Setup Qt Creator for ROS Setup Ubuntu to allow debugging/ptrace
0. 麦克纳姆轮全向移动平台简介 麦克纳姆轮百度词条 还是自己去看百度词条算了,不说太多废话了,简单看看长什么样就行啦。 1. 运动学逆解 入正题入正题,我们直接来聊聊麦克纳姆轮的运动学逆解,正解就不说了,一般来讲逆解比正解麻烦一些,而且会逆解就会正解。正解跳过不说,相信小伙伴们会根据逆解过程得出正解的。 1.0 首
0.三轮全向移动平台简介 在机器人硬件的大家族中,移动平台算是占据了一席之地,近几年在各类大大小小的机器人比赛中使用三轮全向移动平台的频率越来越高,这种有意思的结构似乎越来越受机器人爱好者的青睐。 三轮全向移动平台,从名字就可以大概猜到它长相 移动平台主体由三个全向轮组成,两两夹角120度。这种结构使得移动平台可以在平面
课程目的 SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时建造增量式地图。 在ROS中实现机器人SLAM功能是非常方便的,因为有很多现成的功能包可供开发者使用,例如Gmapping、Hector、Cartographer、RTAB等,可以快速实现二维或三维空间下的SLAM。 本课程将带你走进RO
前言 本节教程演示UUV的一些玩法,基于开源项目UUV,官方介绍文档:uuvsimulator 仿真环境 系统:ubuntu16.04 软件:ROS - kinetic 仿真:gazebo7 安装仿真软件 官网介绍目前支持的版本有三个:kunetic、lunar、melodic 安装命令: kinetic版本:sudo apt install ros-kinetic-uuv-si
第三方账号登入
看不清?点击更换



















第三方账号登入
QQ 微博 微信