引言 参加过智能车竞赛的同学应该深有体会,电机驱动设计水很深,不能马虎,一但出问题,可能就是“火光四射”了。并且驱动的好坏也影响了电机性能的发挥,下面我们来设计一个BTN电机驱动电路。 正文 H桥电路是经典的电机驱动电路,我们本次就采用BTN芯片来搭电机驱动电路。当然,电机驱动的布线也是很有讲究的,因为我们使用的是120W的电机,额定电流10A,所以对散热,耐压等因素的考虑一定不能疏忽。首先我们找
前言 上一篇文章 “多机器人协同控制①——仿真平台搭建” 里已经介绍了多台Turtlebot3在Gazebo中的显示,这篇文章将写一个简单的程序实现单小车的轨迹运动,把整个流程打通一下,为后续的算法验证做一个准备。 1.单机运动 参考上一篇文章中的2.多机仿真,我们已经可以实现多台Turtlebot在Gazebo中运行,
文章目录 ① 背景 ② 前提 ③ 任务 Ⅰ准备 Ⅱ 选择一个topic Ⅲ ros2 bag 记录 Ⅳ ros2 bag info Ⅴ ros2 bag play ④ 总结 ① 背景 ros2 bag是用于记录系统中有关主题发布的数据的命令行工具。它累积在任何数量的主题上传递的数据,并将其保存在数据库中。然后,您可以重播数据以重现测试和实验的结果。录制主题也是共享您的作
描述 在使用ROS的kinetic版本控制UR机械臂时,moveit规划成功但UR机械臂不运动的问题 失败表现 UR机械臂在Gazebo环境下,绵软无力的倒在地上,在rviz环境下一直是横着倒下的姿态,机械臂末端一直位于地面之下 成功的截图如下 注意到,MotionPlanning界面下的“Commands”下有四个按钮,分别是“plan”、“Execute”、“Plan and Execute”
A. 标准层 Static Map Layer:为了做全局规划,机器人需要一个超越其传感器的地图,以了解墙壁和其他静态障碍物的位置。 静态地图可以先用SLAM算法生成,也可以从架构图中创建。 当层接收到地图时,updateBounds方法将需要返回覆盖整个地图的边界框。 然而,在随后的迭代中,由于它是静态的,所以绑定框的大小不会增加。 在实践中,静态地图一直是全局代价图的底层,因此它将其值直接
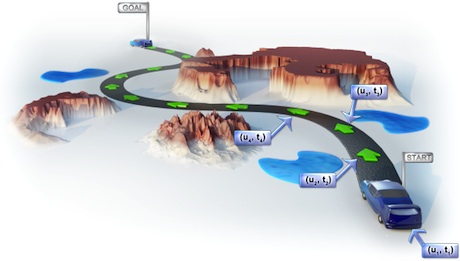
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步: 1、路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的路径,由一系列离散的空间点(waypoint)组成。 2、轨迹规划:由于路径点可能比较稀疏、而且不平滑,为了能更好的控制机
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路: 思路一:把这些”期望“加入到优化问题中。 思路二:调整时间分配,来避免这些问题。 1.corridor 1.1 corridor是什么? 为了限制
如果QP问题只有等式约束没有不等式约束,那么是可以闭式求解(close form)的。闭式求解效率要快很多,而且只需要用到矩阵运算,不需要QPsolver。 这里介绍Nicholas Roy文章中闭式求解的方法。 1. QP等式约束构建 闭式法中的Q 矩阵计算和之前一样(参照文章一),但约束的形式与之前略为不同,在之前的方法中,等式约束只要构造成[...]p=b的形式就可以了,而闭式法中,每段po
目录 一、VIO(Visual-Inertial Odometry)概述 1.1 IMU概述 1.2 IMU 与视觉定位方案优势与劣势对比: 1.3 IMU 数据可与多种定位方案融合 1.3.1 松耦合 1.3.2 紧耦合 二、预备知识 2.1 数学符号约定 2.2 三维刚体运动 2.3 四元数
Arduino智能小车系列教程5——蓝牙小车 Arduino智能小车系列教程 Arduino智能小车系列教程1——拼装篇 Arduino智能小车系列教程2——测试篇 Arduino智能小车系列教程3——调速篇 Arduino智能小车系列教程4——超声波避障 Arduino智能小车系列教程5——蓝牙小车 Arduino智能小车系列教程6——循迹小车 A
Arduino智能小车系列教程6——循迹小车 Arduino智能小车系列教程 Arduino智能小车系列教程1——拼装篇 Arduino智能小车系列教程2——测试篇 Arduino智能小车系列教程3——调速篇 Arduino智能小车系列教程4——超声波避障 Arduino智能小车系列教程5——蓝牙小车 Arduino
Arduino智能小车系列教程7——小车测速 Arduino智能小车系列教程 Arduino智能小车系列教程1——拼装篇 Arduino智能小车系列教程2——测试篇 Arduino智能小车系列教程3——调速篇 Arduino智能小车系列教程4——超声波避障 Arduino智能小车系列教程5——蓝牙小车 Arduino
描述 使用贝塞尔曲线生成路径 已知:若干个二维路径点(x, y),生成一段由一系列(x, y)点组成的点集 公式 网上有很多贝塞尔曲线的概念和知识,这里不做赘述 贝塞尔曲线上的路径点计算公式: 公式的理解: 假设我有6个点,按照点的顺序依次连
0x00 What's STDR Simulator? STDR是Simple Two Dimentional Robot Simulator的缩写,它可以非常容易的对在二维平面移动的机器人进行仿真,STDR的设计目的不是为了像Gazebo那样的大型逼真的机器人仿真或者一个功能最全面、功能强大的仿真器,这款软件的目的是为了尽可能的简单的去模拟单
检测或者训练有问题的可发邮件咨询小编,小编尽力解答1039463596@qq.com 好吧,正式开始跑程序(其实官网都有) 这篇文章是训练YOLO v2过程中的经验总结,我使用YOLO v2训练一组自己的数据,训练后的model,在阈值为.25的情况下,Recall值是95.54%,Precision 是97.27%。 需要注意的是,这一训练过程可能只对我自己的训练集有效,因为我是根据我这一
参考:ros::NodeHandle::advertiseService() API docs 1 包含头文件 #include <std_srvs/Empty.h> 2 创建服务,并绑定服务的回调函数 restart_whole_robot_service_ = nh_.advertiseService("restart_whole_robot", &bp
大概流程走完,其实还是有点懵逼的,下面就官方文档,讨论下细节,要是我自己没注意到的点。 Validate your bag 如果是准备跑自己的或者别人的bag包,这一步是很有必要的,可以从中获得相关消息的topic和frame_id,这个在填写lua文件和launch 文件的topic重映射时可以用到。 首先要在工作目录 source 下,然后执行命令: source devel_
上一篇文章我们强力推导了GAN的数学公式,它就是: 在我们训练D 网络的时候,我们要让V 最大化,当我们训练G 网络的时候我们要让V最小化,就是这么简单。因此哪怕数学推导那篇五六千字的博客不想看,实做也可以做。 实做上比较大的一个问题是我们实际上不能获取到全部真实图像样本和全部拟合图像样本。因此上面这道公式在实做上是搞
注意:本文下载的tensoflow/model版本比较旧,是18年的版本,现在github上有更新,对代码和文件结构进行了一定的优化,因此下文的流程使用起来可能会与最新版本有所差异,大家要根据官方介绍灵活设置 1 源代码测试 1.1 环境配置 环境:tensorflow-gpu:1.9(注意要选择1.9的版本,测试过1.7版本的在最后一步模型转化时会有问题),python3.6 下载git
在自动驾驶领域,激光里程计和建图(LOAM)已经起到重要的作用,归因于它可以在定位机器人的位姿的同时建立周围环境的高精度、高分辨率的地图。 算法简介 算法名称:Loam_livox 针对 FoV 较小的 激光雷达的 一种快速、鲁棒性强、高精度雷达里程计和建图 算法 传统的LOAM算法对应的是传统的机械雷达,对于小FoV和非重复式雷达,直接应用的话效果会不理想。 Loam_livox 在LO
从零开始打造3D自动测绘导航机器人
多智能体编队理论分析与应用实现
自动驾驶路径规划实例介绍
Matlab与机器人建模仿真
slam的基础到slam的进阶,你想到的都可以看
传感器的一些操作
自己所学所看所写的分享
一些杂项,乱七八糟的其他知识点
关于工业机器人的基础知识整理
动力学建模 测试
小沐学ROS的笔记,嘻嘻
讯飞组比赛
这个专栏主要介绍机器人运动学相关理论及代码实现
这篇文章主要介绍机器人动力学及代码实现
折腾、搞机、各种稀奇搞怪配置撒
F1TENTH无人车比赛系列
机器人常用的目标检测算法及其实现
PX4固件的使用及二次开发
原 V-rep 仿真
内容包括自动驾驶轨迹规划过程中常用的优化算法
我是初学者,小白一个,最近参加了关于智能车的ROS仿真比赛,出现了很多问题,依照网上的方法都解决了,但是这个问题一直没有着落,钻研一周没解决。我的版本时VMware16,ubuntu16.04+GAZEBO7.16.在用我自己的笔记本运行小车例程的时候GAZEBO出现了掉帧的现象,同样的例程,在实验室的双系统台式电脑中运行流畅,在其电脑上跑40秒,到我笔记本上得跑两分钟,而且拖拉地图电脑缓慢,小车
一. 天之博特自提tianbot mini 9月5日,终究是不平凡的一天。下午1点,我怀着激动与忐忑的心情,来到了天之博特的总部。电梯上了6楼,在往右拐的一间会议室里,我领到了首发的天宝(tianbot mini以下简称天宝)。桌子上一排的天宝属实震撼到我了。由翻车王老师亲手将装有天宝的铝盒交到了我的手中,心里那个激动哎 二. 使用天宝 事不宜迟,我赶紧找了张桌子就
我在建图导航用2d nav goal 规划路径的时候 没有规划的路径 请问是什么原因
当我已经开启了moveit功能包中的demo.launch,并且想要用Python控制机械臂的运行, $ rosrun probot_c800_demo moveit_ik_demo.py 出现如下警告:[ INFO] [1594446454.067423383]: Loading robot model ‘husky_robot_gazebo’…[ INFO
老师,学长们好!我是负责定位和建图的。目前使用了一套GNSS设备,GNSS天线一前以后安装在车的中轴线上,我使用的是ROSWikid的一个叫做nmea_navsat_driver的功能包,我目前可以通过这个功能包获取的经纬度和速度以及时间戳,获取不了heading的数据,但是我rqt_graph,发现有heading这个话题,但是没得数据,不知道是什么情况,希望老师学长们能帮忙解决下这个问题,非常
我有一个真实的舵机机械臂,现在想用moveit去控制他,我的想法是订阅/joint_state话题,利用里面每个臂的转动量计算舵机实际需要转动的角度,再发给STM32来控制舵机。不知道这个思路对不对,希望各位大佬指点一下,不胜感激 但是这样的话是依赖于一个有仿真的环境下的,除此之外有没有别的接口可以调用正解逆解输出的每个轴的运动量呢。
古月老师,我运行你的源码没有问题,但是用自己的就出现了一个问题。我发现小地图(你的)和大地图(我的)在rviz中订阅/map主题后,是两种显示结果,老师的是如视频一样会直接出现白色扫描区域和灰色方形区域,我的是如载入空地图一样的显示效果,只有一小块灰色的方形区域,没有白色区域,但是雷达是正常的,可以识别障碍物。后来发现是大地图,障碍物与移动机器人的间距过大引起的,缩小间距,让障碍物变得密集后可以出
ros noetic 运行roslaunch mbot_gazebo view_mbot_gazebo_empty_world.launch时,出现一下错误 RLException: Invalid <arg> tag: arg ‘debug’ has already been declared. Arg xml is <arg name=”d
程序用的是古月居提供的ROS常用SLAM功能包指南里面的cartographer。用的二进制文件装的cartographer。但是在运行了键盘控制结点之后产生了如下错误,一直无法解决。求高手指点
一个六轴机械臂,机械臂的末端安装有一个挤出机(1个旋转动作),能否在进行机械臂运动规划的同时,让挤出机同步运动(旋转指定的角度),并让挤出机的运动与机械臂的运动速度保持同步??是否有解决方法?
请教一下,我想在QT应用中创建两个按钮,分别控制ros建图功能的启动与结束,有没有什么好的办法??ball ball各位了(●'◡'●)
Roboware studio1.1.0打开运行时经常弹出错误提示 <b> </b> Roboware studio1.1.0打开后最上方经常弹出错误提示Ycm startup failed. Please check your ycmd or python path.,但不影响工作区内ROS包等运行,附有图片和版本号信息。
运行moveit的 时的两个错误(1)failed to import pyassimp (2)unkown error handler name,实在解决不了,请求大家的帮助,谢谢。
如图,robotiq的夹爪在gazebo里运行非常不稳定,只是稍微运动了一下机械臂,robotiq就基本解体了。 目前考虑修改robotiq的质量和惯性参数矩阵,但还没有调试好。有大神可以解答一下吗?
最近刚开始学习bumblebee BX3相机在ros系统上的应用,bumblebee相机通过firewire与电脑相连,有没有大佬做过这方面的研究的?要是有的话,能分享点资料本人将不胜感激。谢谢!!
在两个或者多个多自由度机械臂密集安装时,机械臂之间存在碰撞的风险。本项目使用包围盒法,将机械臂连杆视为空间中的线段,将障碍物使用球体包裹,通过空间解析几何的方法
多自由度机械臂在变换的环境中实时运动规划时,机械臂碰撞的风险很大。本项目使用空间分割法,将碰撞检测融入到随机路标法的查询过程中。使用FPGA的并行特性加速碰撞检
本项目将由分拣顺序造成的路径不同抽象成旅行商问题,以基因算法得到最优路径。同时避免了陷入求解局部最优的问题中。
本项目实现了一种基于基于轻量型卷积神经网络的机械臂快速分拣方法,使用GuYueInvent PROBOT Anno实现了目标物体的检测,定位和分拣。
买不起狗,咱们就仿真一个
针对小白的OMPL入门教程
通过Matlab学习机器人
讲解机器人学中基础而重要的知识
在ROS-Gazebo中如何更好地使用SDF格式建模与仿真
该项目从ROS多机器人仿真入手,实现Gazebo环境下多机器人的简单编队,以及Rviz中多机器人的自主导航,最终实现多机器人导航+编队的效果。
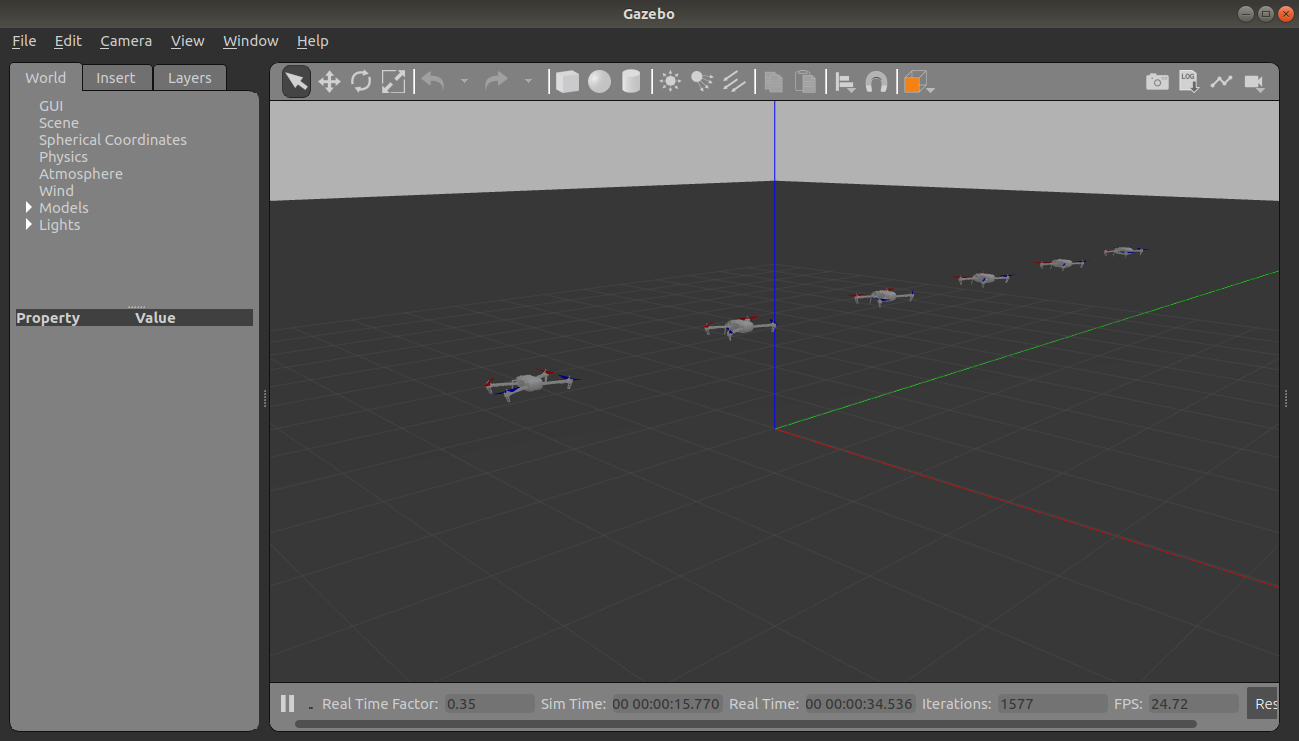
本项目主要实现多无人机编队仿真实现,在利用Matlab,Ros,Gazebo等工具下仿真实现完成
基于6自由度机械臂+Realsense相机实现对物体的动态识别及抓取
在ros的学习过程中我们经常可以看到自主导航的小车,那么无人机是否也能像小车一样建图导航呢?本文即主要介绍如何在px4平台基础上进行无人机自主导航仿真实验。
首届高等教育创意机器人大赛的主题二一机械手解魔方
当前,水下领域比较小众,开源的资料比较少。Bluerov作为成熟的产品,结合其开源的优势,经历了多年的技术迭代,在市场上受到极大欢迎。ROS在机器人领域得到非常广泛的应用,开源资源非常丰富,使得开发非常方便简洁,本项目基于ROS搭建一个开源的软件框架,适用于ROV/AUV等水下平台。本项目由鹏城实验室提供支持。
本项目为无人机常用控制算法的专题,包括PID控制,自抗扰控制原理的深度剖析与代码实现,同时也补充了控制分配矩阵的求解与相关问题
对于串联机器人来说,求逆解的难度要大于求正解,市面上的工业机器人一般是利用的是利用解析法求封闭解,机器人有封闭解是有条件的---Pieper法则。另一种求逆解的方法是利用迭代法求数值解,适用于不满足Pieper法则的构型,特别适用于运动学冗余的机械臂。
本项目详细介绍如何从零开始用51单片机去实现智能小车的控制,从硬件到软件都逐步进行了讲解
本项目基于STDR详细介绍了如何在2D空间中对ROS小车进行超声波避障、定位、路径规划、地图构建、定点巡航等功能的仿真实现。
本项目为一系列的V-REP自学笔记,项目最终完成一个Demo。使用官方提供的KUKA公司的YouBot机器人模型来实验机器人的感知和控制过程,控制机器人从A点抓取物品,然后移动到B点将物品放置在B点的工作台上,这其中涉及到V-REP环境中的机器人感知和控制过程。
第三方账号登入
看不清?点击更换



























































第三方账号登入
QQ 微博 微信